
Leaderboard




Popular Content
Showing content with the highest reputation on 12/17/2018 in Posts
-
Congratulations for your attitude Goran, TBM900 has its issues, some related to the platform constrains but you guys are working hard on this Think is: I can see a gold future for HotStart and Laminar Research, we will keep pushing, if you don't mind Cheers2 points
-
Completed 5 Hr+ Flight with 11.30RC1 and TBM 900 Version 1.1.3 without any problems. No more crashes observed! Great job and great simulation. I keep discovering more amazing detail every time I look at this plane1 point
-
Fixed. Next update. And thanks!1 point
-
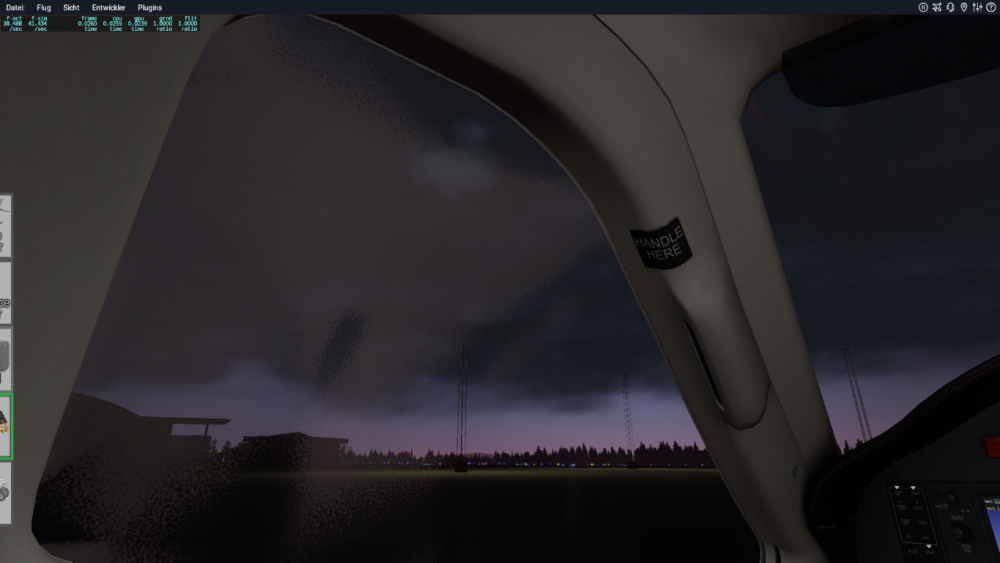
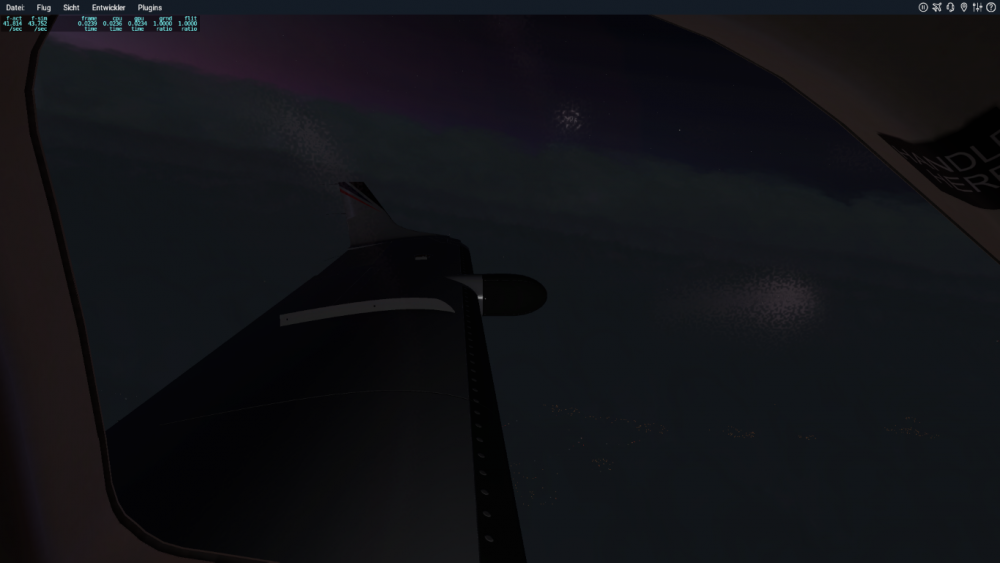
Hotstart, you could at least clean the windows before you deliver an aircraft to us... Jokes aside, the windows look as if they are covered with some residue. (just as if somebody smoked a pack of cigarettes inside) I did notice this also before, but after today´s update it seems much more prominent to me. In a night environment it is clearly visible, but also in daylight if you look close.

 1 point
1 point -
Great additional feedback. I was not aware that AS was already released!1 point
-
Isn't this how it should be? It's a momentary switch.1 point
-
This... and someone making a joystick thingy to simulate the TBM 900 throttle and center console... ... and shut up and take my money. WOOO!1 point
-
I think the underlying message is that the team is busy with various family and professional commitments and that any form of commitment or projection of future plans for release are likely to setup expecations within the community that might not be fully met as life unfolds. It's better to publish the feature list contained in an update, and a date of availability for the update, when the update is actually ready to publish. This keeps expectations and promises more realistic. The community also needs to bear in mind that while some key members of the team are busy with high profile obligations their pre-existing products have been supported in the market for 10 years with free updates. The IXEG project was purely self driven with no funding at all for five years before release. The technologies it relies on are created and maintained by myself, and I've been in the X-Plane arena for nearly 15 years. In short: "Reports of IXEG's death are greatly exagerrated."1 point
-
Yes.1 point
-
Yes.1 point
-
@Pawel D. Very nicely explained. I'll just add that for LOC-only approaches, you wouldn't use APR, only "NAV". "NAV" is basically the roll mode, "APR" in addition also arms the GS pitch mode. So for localizer-only approaches, only use "NAV" and leave "APR" off. Little trick for achieving a constant-angle descent on a non-precision approach: Stabilize your airspeed. De-select any active pitch mode (e.g. when in VS, push the "VS" key again to de-activate the mode). This reverts the aircraft into pitch-hold mode. Use the UP<-->DN scroll wheel on the AP panel to manually adjust the pitch the autopilot will hold. Fine tune the pitch until the green FPV marker sits over the desired glidepath angle.1 point








