Bulva
-
Posts
193 -
Joined
-
Last visited
-
Days Won
3
Content Type
Profiles
Forums
Latest X-Plane & Community News
Events
Downloads
Store
Everything posted by Bulva
-
I don't know if I understood You correctly, but in my solution the place where you press the button is checked and it should work as you describe ...
-
If you are in VR it doesn't do anything
-
It looks promising (although the throttles visualization for VR users does not contribute anything). I just hope that it will be possible (using one button) to go down to the BETA range for each axis separately (not with the mouse, but with the Bravo axis).
-
I cannot play the movie ...
-
No animation and sound of lever lifting in the PROP axes
Bulva replied to Bulva's topic in Mitsubishi Marquise MU-2 v2
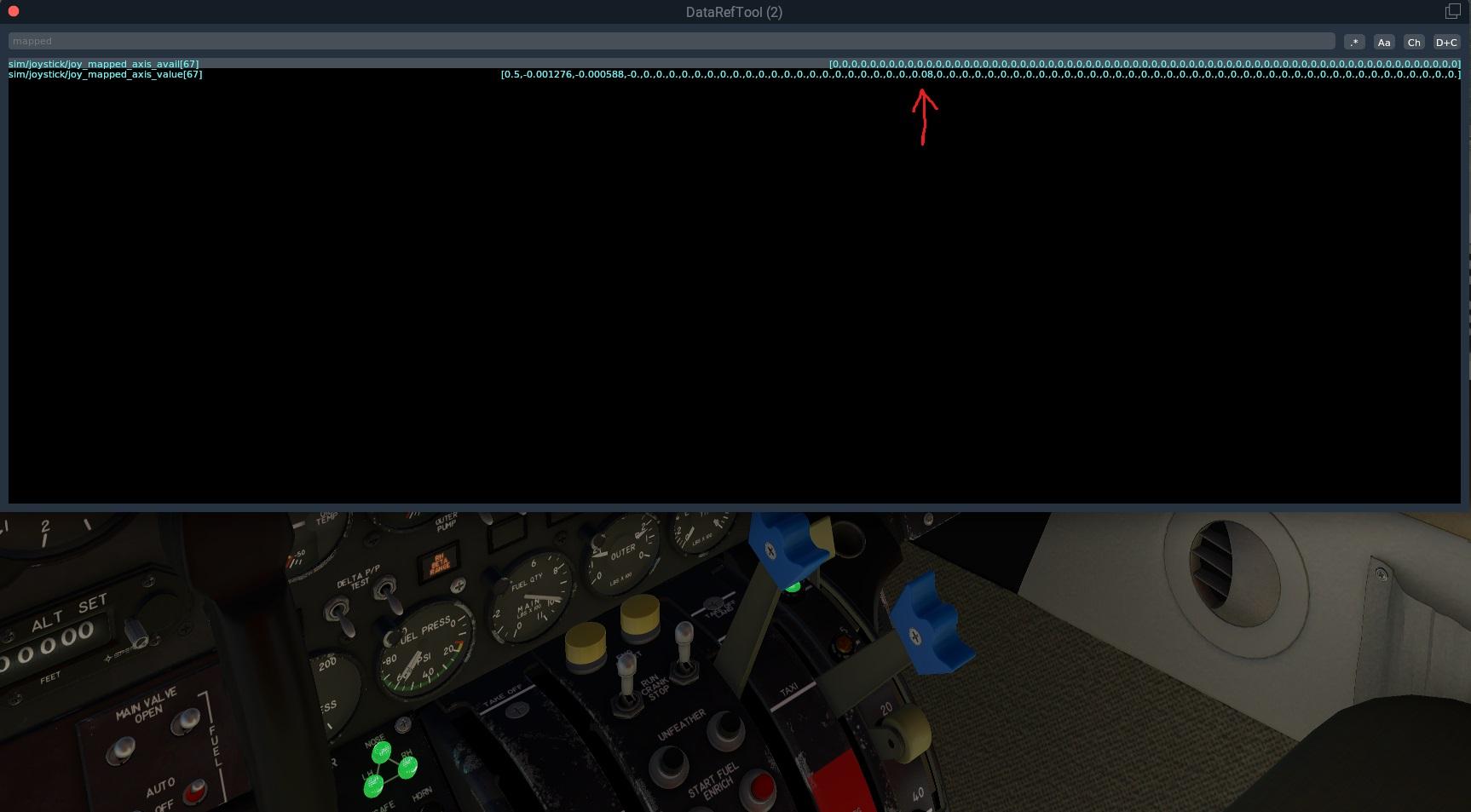
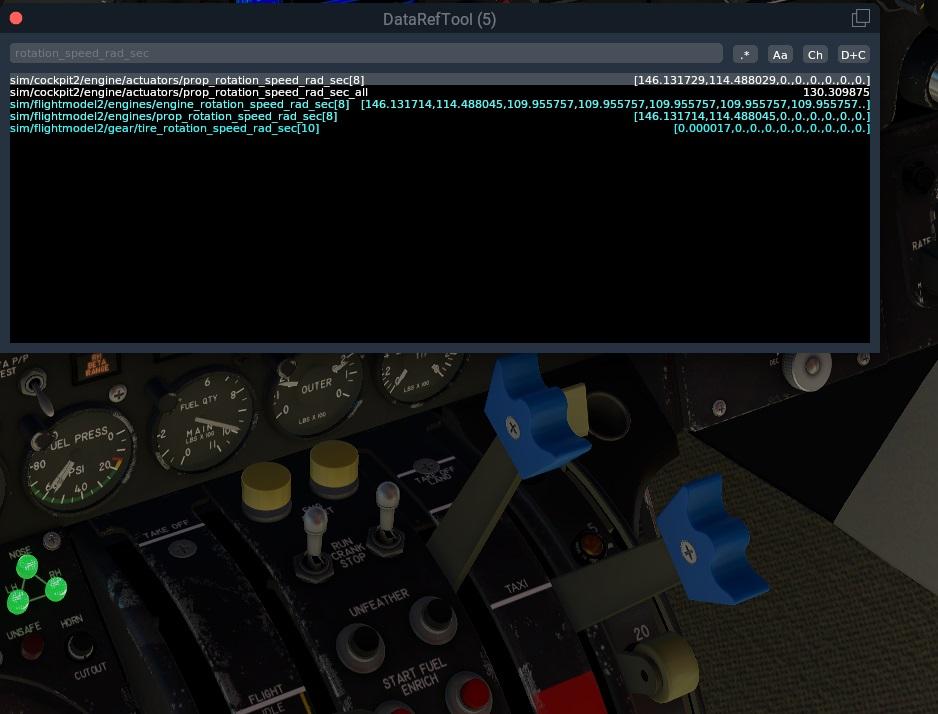
Two more screenshots from DataRefTool (although I don't know if it whatever will help ):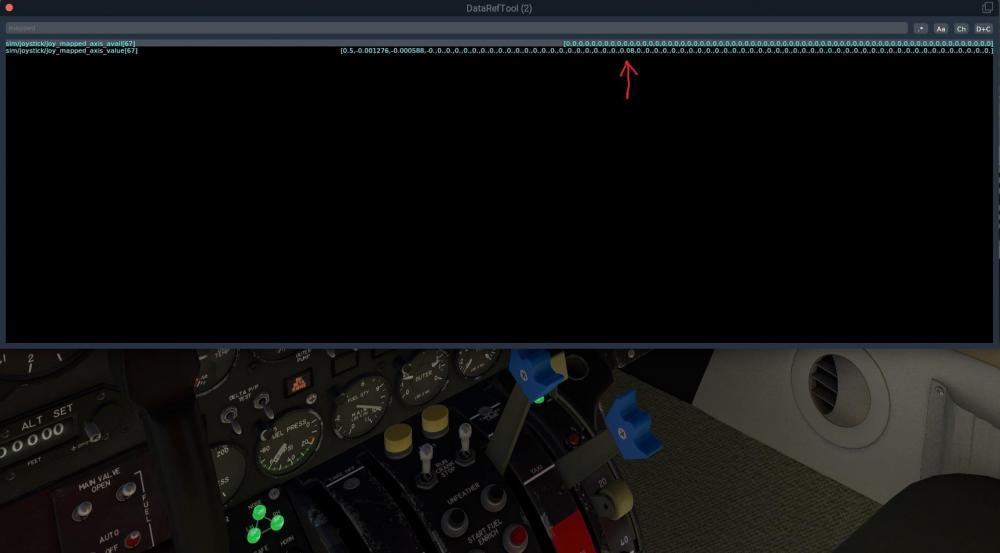
-
No animation and sound of lever lifting in the PROP axes
Bulva replied to Bulva's topic in Mitsubishi Marquise MU-2 v2
Now I used the Gladiator joystick (instead of Bravo). I set: the Gladiator's axis as PROP 2. I assigned a button peden to the command "Move right condition lever to EMER STOP". The curve is set like this: It still looks a little different than Yours and still no animation and no lever lifting sound. In version 2.0.0, the animation of lifting the lever was visible (of course there was no sound, because it appeared with v2.0.1). Another video: xsMU2B60_4B_GNS - 2022-08-07 23.53.06.zip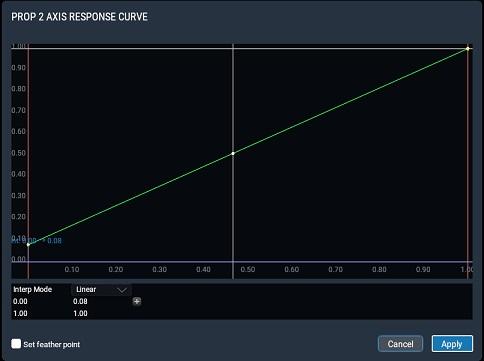
-
Strange Throttle Behaviour with Lift Both command
Bulva replied to Ch.Cole's topic in Mitsubishi Marquise MU-2 v2
I also would like to use one button for both levers. Anyway, my solution also allows it. -
No animation and sound of lever lifting in the PROP axes
Bulva replied to Bulva's topic in Mitsubishi Marquise MU-2 v2
I use the recommended curves. but i tried other settings as well.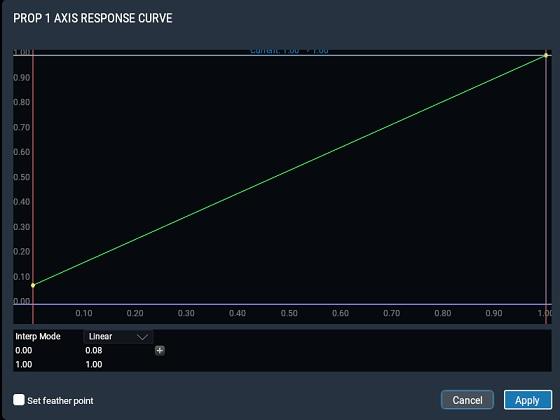
-
I mentioned it in passing in another thread, but I will remind you in a this thread so that the topic does not escape from the new update. If I am using the mouse to move the PROP lever then everything is OK - i.e. below the TAXI value, you hear a sound and you can see the lever go up. If I use the assigned PROP axes (to my Bravo), the levers only shift - i.e. they go below the TAXI value, but without the visual animation and the sound of lifting the lever. This is what it looks like when I use the mouse: MU2_PROP_mysz.avi ... and this is what it looks like when using Bravo: MU2_PROP_bravo.avi
-
It is not such a unique solution. If I remember correctly, the popular Saitek Pro Flight Throttle also has a button in the bottom position:

-
Are toe brakes meant to be ineffective at slow speeds ?
Bulva replied to Matchstick's topic in Mitsubishi Marquise MU-2 v2
I don't have this problem in v2.0.1 -
I just wrote back in that thread. I think you understood that exactly. I also added a link to the video ...
-
I think you understood that exactly. Just in case, in this thread again, step by step I tried to accurately describe the behavior of my solution. I have also included a link to download a video that shows the MU2 throttle lever behavior with this solution:
-
So one by one (as long as it allows me to translate the google translator well ). I will describe it for one of the throttle Bravo axes (the other one behaves identically): 1) upper range: from 100% to 50% of throttle range - axis Bravo works normally for throttle Alpha range. 2) going down - to a value of about 50% (here my lua script checks if Bravo axes are between 47-53% of the power range by checking the parameter - "xscenery / mu2b60 / manips / L_power_lever_rotate" (lines 16 and 24 in lua script) 3) when I move the Bravo throttles down (without pressing the button) nothing happens -> the power remains at 50% - which prevents accidental entering the Beta range during the flight 4) when you are between 47-53% power ("xscenery / mu2b60 / manips / L_power_lever_rotate") and you press the "MU2_LIFT_BOOTH" button then: 4a) if you are outside the range of 47-53% - pressing and releasing the button and "MU2_LIFT_BOOTH" does not change anything 4b) when you are between 47 and 53% of power and press and release the "MU2_LIFT_BOOTH" button, then the lever is raised (dataref ("PULL_L", "xscenery / mu2b60 / manips / L_power_lever_pull", "writable") -> PULL_L = 0.013 - line 18 of lua script) and it will move to the Beta range (THR_L = 0.50 -- lines 19 and 27 in lua script). 5a) If you move the Bravo lever back up, you will return to the Alpha range again 5b) if you move the Bravo levers down, you will decrease the power in the Beta range. 6) in the Bravo profile (THROLTTLE 3 (4) AXIS RESPONSE CURVE)) there is a horizontal line between 40 and 50 set to a value of 49 to provide a margin of "inertia" when you move the Bravo lever. In other words, you have "more space" to effectively use the "MU2_LIFT_BOOTH" button. 7) on the left, extreme side of the THROLTTLE 3 (4) AXIS RESPONSE CURVE profile, I have set the minimum value to 10, it prevents entering the maximum reverse range. The value "10" is my individual setting, in which you smoothly (being in the Beta range) control the low power of the reverse, which is convenient during a taxi. 8) At the very bottom position of the Bravo lever there is a hidden switch (no. 9 and 10) that activates when you slide the Bravo levers all the way down. I assigned the command "MU2_REV_L" (and similarly MU2_REV_R) to this switch. When the Bravo throttle is still down (the button is still pressed), then the reverse thrust power increases continuously (if (THR_L> 0.0) then THR_L = THR_L - 0.002 ----> lines 47 and 58 in lua script), until the maximum reverse thrust is reached. 9) When you flip the Bravo levers back up (the button is released) and the power is controlled again the Bravo axis in the Beta range I'm sorry I can't describe it better. There are a few people who have tried my solution and are happy with it, so perhaps someone with a good command of English can do a better description of these steps. At this link there is a short video for download, that shows how the throttles MU2 behave with my solution: https://mega.nz/file/Q7pCwZIR#CDOniuNOnzDj7V0EHWF1yq756G0FAmWpWalIaI0APKg
-
The first time it happened to me, I thought it was a coincidence. But today I had this situation for the second time so I am signaling a problem. When I remove the props "manually", ie in the external view, by clicking on: intake covers and pitot covers, the speed meter no longer works (the pointer remains stationary at "0"). When removing props directly from the GUI window, the flight speed indicator was working normally.
-
Very small and small important detail , but it would be nice if it appeared - the sound of the opening cupboard (where the keys and headphones are). Since the opening and closing of drawers makes sounds, I thought that the sounds of opening / closing cupboard doors would be pleasing to the ear. I use this cupboard on every flight, but never use drawers
-
That's what I love VR for. I turn around and turn off the fuse
-
Sorry, I don't remember if there are any implemented commands for MU2: pitch_trim_wheel_nose_up and pitch_trim_wheel_nose_down. I'm not at the computer with XP now. I did it with dataref:: "xscenery / mu2b60 / manips / ap_pitch_trim_wheel" in the .lua script
-
I don't know if that's how it should work in real MU2, but now it looks like this: - to use the pitch_trim_wheel_nose up / down mode, you must have VS and ALT modes turned off (main switch AP - turned on) - when you press the VS button while climbing or descending, the VS "remembers" the current climb/descent angle setting. - when you press the ALT button, the plane will fly horizontally at the current altitude.
-
Of course, it would be great if the commands I had to "create" in the lua script could be accessed directly from within XP / MU2. In my solution it works like this: - Alpha range - it is about 50% of the range of lever movements (upper range) of Bravo - when you withdraw the lever below the Alpha point - the MU2 throttle remains at the lowest Alpha setting (no matter how far you withdraw the Bravo lever - this prevents you from accidentally entering the Beta range during the flight) - when you press the button (MU2_LIFT_BOOTH - I'm assigned to the button "Go Around"), then the throttle MU2 lever rises(pulled) and moves to the maximum BETA setting (THR_R and THR_L = 50) (but only when the Bravo lever is in the near position of the Beta range - "if (THR_L <0.53) and (THR_L> 0.47) then ....") - when you continue to move the Bravo lever down, you smoothly move from Beta to REVERSE. For my own use (because I prefer it ) ) I made that the Bravo axis you can use a small reverse string value (THR_L and THR_R = 10), which allows a safe range power during a taxi. - I get the full Reverse by moving the Bravo levers completely back, where the button to which I assigned the commands: MU2_REV_L and MU2_REV_R is used This solution also allows any individual descent from Alpha to Beta (and REV) for each engine separately. (which may be needed, for example, when one engine fires ;-)). Moreover, as I wrote earlier, it also improves the behavior that after starting the engines (from the C&D state) the "LOCKS PROP" locks remain blocked (although after starting the ENG Torque 1 and 2 indicators show RPM - this is not correct). To release the Prop Lock, the Throttle levers must be moved to the Reverse range.
-
Please take a look at my current solution with Bravo: I have been using this configuration for a week and I am very happy with this solution. I would not like the new version of MU2 to prevent me from using this solution. ;-)
-
TOGA Simulation MU-2 Marquise v2.0.1 Update Released!
Bulva replied to Cameron's topic in Mitsubishi Marquise MU-2 v2
Find the dataref: sim / operation / override / override_wheel_steer and set to "0" I did a simple command in a .lua script, (until an official fix appears). -
http://www.togasim.com/mu2docs/setup/hardware_setup.html
-
As in Title: By the way, I will ask: should the ENG START buttons not glow orange? (in full sun would be more visible in VR):



-