

tkyler
-
Posts
2,825 -
Joined
-
Last visited
-
Days Won
612
Content Type
Profiles
Forums
Latest X-Plane & Community News
Events
Downloads
Store
Everything posted by tkyler
-
 agree, just need to record the right sound. Particularly the latch. Wasn't happy with what I orginally had, but definitely will get those sounds in. -TK
agree, just need to record the right sound. Particularly the latch. Wasn't happy with what I orginally had, but definitely will get those sounds in. -TK -
TOGA Simulation MU-2 Marquise v2.0.1 Update Released!
tkyler replied to Cameron's topic in Mitsubishi Marquise MU-2 v2
Understand your sentiment Marc and many times, these bugs do seem silly, even to me. I'll keep fixing though and we'll get through this phase soon enough. -TomK -
The knob is animated off of the default x-plane dataref, nav1_obs_degm (because the knob is mechanically linked to the compass card). The knob should animate any time the HSI OBS rotates. The GPS/VLOC should have no bearing on the knob animation of course.... Those commands animate the HSI knobs for me no matter what mode (VLOC/GPS) I'm in, so I can't confirm what you're seeing.
-
All good Jerry, thx for clarifications! -Tom
-
Bear with me...and I am SURE I am not seeing all options for BRAVO users, so this is just a discussion to get things going. When I was at Air Venture, I spoke with the CEO of Honeycomb and tried their Bravo quadrant with the MU2. I found it to be a bit confusing and this sentiment was echo'd by one of the Honeycomb sales staff, claiming the confusion stems from "lever movement below the detent" that does nothing. So as you move the lever aft below the detent, a command is executed just aft of the detent, but you can continue to move the lever backwards but nothing happens...there is no axis values coming out of the hardware below the detent for us devs to do anything with. Please read on before immediately responding So for Bravo users, as they move their levers aft TO the detent (in ALPHA region), the axis values goes to zero at the detent and if you map the detent command to "lift power levers", then the levers will immediately animate to the "3D lever 0 position" to match the raw axis value of zero, which is full aft/reverse in the Moo...and a bit of an odd jump of the levers from flight idle to full reverse. Now lets say you do not have a Bravo with that "command detent"....and we'll use the TBM as an example. In the Moo, you can elect to have the throttle 'stop at the detent' until you command it over, at which point it then animates to match the raw joystick value. Now where this 'virtual detent' is on your own hardware is subjective. Whose to say the 'virtual detent' in the TBM should be at 30% of your raw joystick movement...or 40% or perhaps whatever the real thing is? In the Moo, I think I hard-set it to 50% as per the real quadrant (and ignore the power detent ratio..which is for REAL detents only). This gives identical resolution in ALPHA and BETA range raw values and matches the Moo's 50/50 split. The point I'm getting to though...is that in this second example of a simpler joystick (no command switch aft of lever travel), there are still non-zero RAW joystick values below the 'virtual detent' in which to operate your joystick in the BETA region...so you don't get that funny jump to full reverse. In the Bravo, this is not the case...UNLESS you're OK with never moving the joystick below the detent and adopting the "simple throttle lever" technique ....i.e. the Bravo detent position is analgous to a simpler joystick's "full aft position" where the raw values are zero. This is what I found odd about the Bravo with regards to the MU2. Your mind says "I want continuous BETA control below the detent", but there are no raw values to work with.....only the command trigger. So when the command is executed at raw joystick values of 0...what should happen? SO....after dreaming about this the following night.....if it were ME and I was a Bravo owner.....I asked myself...what might feel natural with the Bravo...even though the Bravo config does not mimic the MU2 quadrant well..and some compromise is required no matter what.....and this is what I'm currently thinking...its a bit of a combination of TBM-like behavior and IXEG behavior all rolled into one..and not sure yet what roadblocks I might find if I go down this road. As you move your Bravo lever aft towards the detent position, the 3D levers move in the ALPHA region normally, from max throttle to flight idle. I'd call this the lever ALPHA MAPPING. If you continue to move your Bravo lever further aft though and trigger the command switch, then we could switch to BETA MAPPING and the "full foward position" of your Bravo now becomes the flight idle position....and full aft of your Bravo now becomes the full reverse position; however, being that your lever is full aft at the instant of command triggering from ALPHA to BETA... the beta mapping would not be effected until you moved your lever full foward to essentially "reset the mapping. So, in essence, joystick movement is temporarily ignored when transiting between ALPHA/BETA modes until you move your levers to the opposite limit position and initiate the new mode. This is where a ghost-throttle graphic would come into play in some fashion. When in the BETA MAPPING mode though, the command switch would do nothing if you move your levers below the detent, because you can't, in reality, move the lever any further aft and there would be nothing to do. This might be awkward for some...but again, the Bravo doesn't map to the Moo quadrant well. Another question though....How then, do you switch from BETA mapping back to ALPHA mapping when moving the lever towards the forward limit of travel.... because there is no command switch at the forward travel position of the Bravo. You'd be using a hardware switch command to go from ALPHA to BETA, but not from BETA back to ALPHA. That would have to be either a keystroke command or "smart ghost throttle code" in combination with a 'sniff command' to let the Moo know you want to switch modes (and not just stay against the stops). The reason this would be acceptable "for my mind" if I was a Bravo owner, is because the hardware lever would always moving in the correct direction when in ALPHA/BETA modes.....BUT...with the compromise of a quick lever movement to the opposite limit to effect the change..and this could be awkward also as it is an unnatural movement when nothing is happening. So for example....during landing, you'd pull the Bravo levers to the detent (flight idle)....then after landing and wanting to go into BETA....effect some command (hardware switch or keystroke) and immediately move your levers full foward to 'reset the mapping'...and then you could pull your levers AFT to effect reverse, same as in the Moo. Even this has an annoying compromise if you're constantly going into ALPHA/BETA when taxiing as you'd be slapping your levers all over the place when switching modes. I couldn't say that after a bit of use with the Bravo, I would not just opt for the "TBM like" behavior and ignore the detent command altogether. There seem to be no ultimate solution that satisfies all. So...I'm ears to hear your suggestions, thoughts and recommendations, but in the end, the Bravo lever tech does not map well to the Moo IMO...so I am curious as to what the most preferred method may be that most will accept (because it will never be all) -TomK
-
Back from Oshkosh Air Venture airshow. Thx for patience...I'm off and running again. http://togasim.com/mu2docs/release_log.html Slightly revised the bug tracker links at left side of page to be a bit more clear with regareds to versions. Also added new bug tracker page towards the V2.02 release for folks to follow along. -TomK
-
I'll take a look at each of these in this current update pass -TomK
-
Thx Dion, those have been fixed and we are rolling along for more improvements. -TomK
-
The lights respond to the physical flap position at each of the fixed positions and are not affected by the lever position...so you have to wait some seconds for the flaps to reach their positions before the lights come on. If you observe the lever snapping into a flap detent and the lights don't come on (assuming power) after at least 10 seconds after moving the lever (some flap positions are slow to be reached), then let me know. I did not observe this when cycling through all the positions with the "lever snap code test" -TomK
-
FYI for hardware....I'm about to start a pinned topic on hardware interactions (The throttle 4 unresponsive is a known bug and already fixed for the next update) Keep an eye out for a pinned thread on hardware discussion shortly. -TomK
-
@danhenri there is a bit of confusion over the "pitch trim wheel" (the white guy) vs the "autopilot pitch wheel" (the silver guy on the AP panel)...which is what you are probably talking about? I don't have commands for that wheel yet, but have made a note to put one in. -TomK
-
beacon light not illuminating ground
tkyler replied to vasanta's topic in Mitsubishi Marquise MU-2 v2
vasanta is correct, it is not illuminating. The rotating beacon uses a quite complex default effect from X-Plane...which was done by Alex Gifford (aka propsman) and is about as good as it gets for non-LED effects IMO; however, it never utilized HDR 3D lighting at the time. I originally did have 3D illuminating lights in place, but X-Plane occludes the effect if the 3D lights are placed inside the lens. Placing the 3D lights outside the lens just look good so I left it out until a better "aha" moment struck me or XP12 improves upon it (which I have not tested)...the reflections particularly. I may give this another go, certainly I'd like the effect in. -TomK -
Sorry guys. "pull" isn't "rotate" typo in my lever code from cut/paste. Fixed. Trying to blow through all issues before the weekend! -TomK
-
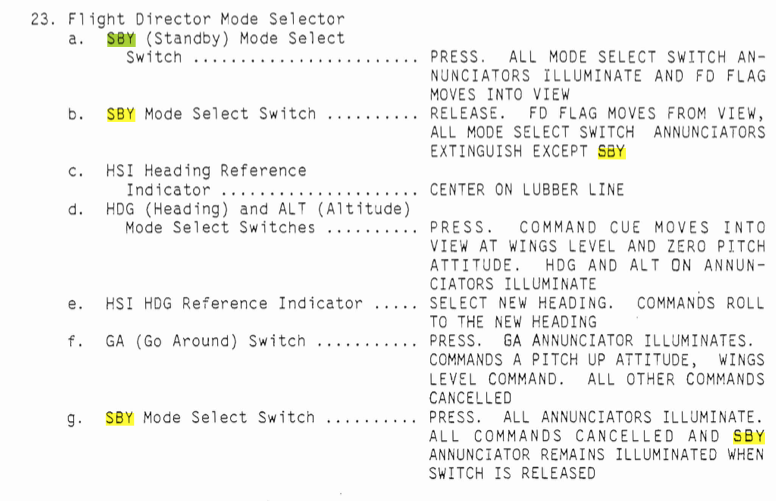
This may actually a mistake in my documentation. I have gone over the entirety of the "Supplement 25" for the SPZ system and can find no reference on how to turn off the FD once its been turned on the by SBY switch. I'm trying to get a hold of some MU2 owners who can verify what the true operation is. The documentation is a bit sparse actually. Indications though, are such that it seems it may be this way....in other words, the FD is intended to always be "at the ready". The excerpt below is from the preflight checklkist for the SPZ. You can turn it off by cycling the "FLT DIR" fuse behind the pilot left shoulder. and FYI, I am working on "Autopilot Documentation" with examples and these procedures going into the docs. -TomK
-
v2.01 Taxi lights can't be turned off?
tkyler replied to lrargerich's topic in Mitsubishi Marquise MU-2 v2
*sigh...Thx guys! -TomK -
That switch (and its animation) is mapped to : sim/autopilot/servos_off_any I need to purge the commands I ended up not using. -TomK
-
Comprehensive performance analysis/tweaks is coming. I am tweaking the engine thrust at flight idle, which is a bit high and . I made contact with a Moo owner who will be getting me charts and such for performance tweaks.
-
This was simply my consolidating code to avoid divide by zero (rather than simple test). The lowest value should go down to 0.01 (0.01 works on my end)... I'd think that 1/100th of a second is enough to stay out of the way of your pedal feel? Have you tried values below 1? If you set it to 0.01 and it still feels weird, let me know. My testing felt "instant" with my pedals with that low value.
-
I'm simply going to have to test this more....because the GPS units are "Laminar's" and not mine...they respond to datarefs in ways I can't always control or unware of and indeed this has been a pain in the past. I'll try to get a bit more creative to get these behaviors more consistent. At the least, Austin is super supportive of my observations for XP12 and I'm due to "give him a list" of any concerns that require changes on his end. -TomK
-
Thanks for your inputs Jerry. Not seeing one in any of my reference pics, but I could have missed it OR it could have been added in differing models Can't say I ever noticed the sound in my flying the MU2. Its reasonably slow and quiet. Are you advocating for "click of switch"? or some kind of looping "clicking" while the wheel turns? I'll see what I can do here. ...seems first time around the 'avionics_on' turned on both GPS and was giving me headaches trying to isolate the units to the differing radio busses. I did talk to Austin at Oshkosh about this for V12 and he's amicable to expanding the bus isolation systems and admits is "light"...but there may be a way around it. Its on my list now. Thx, on the list They should illuminate only at "trim limits". They indicate "no more trim available" This is to simulate repeatability of concrete / runway casting seams. I know this is subjective. Are you advocating eliminating it? or reducing its amplitude or frequency? I'll hear arguments for amplitude or frequency, but not removal. Have never seen this one. Are you using the manip regions under the switches? (down arrow cursor) Fixed. simple togges the Avitab as if by mouse. Known issue. fixed roc? not familiar with that acronym. Will expand the commands for ON/OFF. unsure hold...that's an odd operation with the real parking brake. Can do This is a bit subjective IMO Jerry, mostly because of the diverse array of hardware and their own sensitivities. I got into a real MU2 at Oshkosh to play with the levers. There is a light click when pulling the levers up, depending on how hard you do it. The more audible click is when you push them forward over detent and the metal restraining pin "snaps down" under spring pressure...metal on metal. With auto stop, indeed there should be no sound when auto stopping..they are simple "at the limit". however, perhaps you're advocating for a sound here though? My sound is "For the lift itself" and so will not play until they are lifted. All that being said, I am about to start a new forum discussion on an alternative method of throttle actuation that discusses your concern above. I met with the CEO of Honeycomb while at Oshkosh and their Bravo hardware is a bit "weird" IMO when it comes to their detent and lever travel range...and even the salesman said they get a lot of confusion about it. I'll discuss it more in a bit, after getting these initial responses out of the way. Can do. Was saving a comprehensive "commands for everything pass" until the really obvious stuff was taken care of, but easy enough to add these in for the next update. -TomK
-
TOGA Simulation MU-2 Marquise v2.0.1 Update Released!
tkyler replied to Cameron's topic in Mitsubishi Marquise MU-2 v2
Back from Oshkosh and rested. This is fixed. Moving through my list as rapidly as possible for quick update. TomK -
noted on these. This posting has been logged also. These shoudl be removed. The geometry of the window precludes rotating the Avitab effectively. It ends up conflicting with the window and shifting it over to accomodate the rotation, ends up occluding instruments. in the end, I decided on the one orientation. These commands will be going away. Thx for inputs, all will make the MU2 better TK
-
logged. Thx -TK
-
would be pitch wheel only. -TK
-
Thanks a ton Isaac. performance tweaks will follow behind all the usability tweaks, but having good flight data is really super helpful! Thanks again. We'll take as much as we can get. -TomK

