ddunwoody
-
Posts
15 -
Joined
-
Last visited
1 Follower

ddunwoody's Achievements
")





-
Unofficial (lightly tested) RealityXP GNS configuration
ddunwoody replied to ddunwoody's topic in General Discussion
So, after a flight test the above works okay in GPSS roll steering mode - it's a bit overeager to correct, but it can be babied onto the track and does okay. Couldn't get a glidepath to appear or engage APPR mode on a LPV approach, which isn't a surprise - probably needs some coordination in the Mu2 itself for that. -
Hi, Although not tested much, here is a configuration for the RXP GNS530W/430W for the Mu-2 GNS version. I've elected to connect fuel-flow and air-data to the 530, although I've not yet flight tested these. There's no auto-slew or OBS course-in as I couldn't get them to work. In addition, the GPSs are wired up to _replace_ the VOR signals when set to CDI mode. In lieu of some replumbing in the Mu-2 itself, I think this is the best I can do, but I'd be very happy to be corrected. At the very least, this gives you some starting coordinates for the panel rendering, which was a little tedious to calculate! DavidRealityXP.GNS.ini
- 1 reply
-
- 2
-

-
A "close enough" PBN for the GNS GPS variant would be something like: A1B2C2D1L1O2S1. I'm using ICAO equipment code DFGRSY.
-
Reality XP GTN 750/650 Integration
ddunwoody replied to riceman718's topic in Mitsubishi Marquise MU-2 v2
Tom, I'd be interested in using the RXP GNSs - I think it's just a matter of providing a config file with some parameters and coordinates for the panel textures, but I haven't looked into it myself and I don't know if you would need to plumb into any different datarefs. David -
@Ch.Cole I took your script and did a bit of modification to add some gates. There is a "lift levers" command to bind to allow you to pull the levers back. Barely tested, but it might be useful to someone else until we have gates natively. @tkyler as far as I'm concerned, feel free to use this code as inspiration or wholesale in the Mu-2. My bits are the THR_set functions mu2_throttle_helper.7z
-
Hi, Hand-flying the DVR SID out of LFAC after a missed approach on the RNP24, I had a CTD when pressing the NAV button on the autopilot with SRC1 set to VOR, CRS 310 and a manually tuned frequency. Log attached, but stack trace is: 0 00000000812C8D5B C:\X-Plane 11\Aircraft\X-Aviation\CL650\plugins\systems\win_x64\systems.xpl+0000000000388D5B (update_VLOC_arming_VOR+37b) 1 00000000812CA142 C:\X-Plane 11\Aircraft\X-Aviation\CL650\plugins\systems\win_x64\systems.xpl+000000000038A142 (fcc_update_modes+6e2) 2 00000000812B2F16 C:\X-Plane 11\Aircraft\X-Aviation\CL650\plugins\systems\win_x64\systems.xpl+0000000000372F16 (fcc_main+f16) 3 00000000814427E7 C:\X-Plane 11\Aircraft\X-Aviation\CL650\plugins\systems\win_x64\systems.xpl+00000000005027E7 (runpool_worker+1207) 4 000000008143AB6F C:\X-Plane 11\Aircraft\X-Aviation\CL650\plugins\systems\win_x64\systems.xpl+00000000004FAB6F (_lacf_thread_start_routine+f) 5 00007FFA0B4A7034 C:\Windows\System32\KERNEL32.DLL+0000000000017034 () 6 00007FFA0C742651 C:\Windows\SYSTEM32\ntdll.dll+0000000000052651 () Log.txt
-
Hi, Just had a reproducable CTD when going direct, either using the DIR screen or moving the waypoint up on the LEGS screen. Route was `EGKB DET L6 DVR L9 KONAN UL607 KOK IDOSA SUTAL UN852 GTQ UT27 BLM LSZH`, crash was when on the leg `KOK -> IDOSA` and going direct to `BLM`. Logs attached, one using DIR and one using LEGS. DIR-BLM.txtLEGS-BLM.txt
-
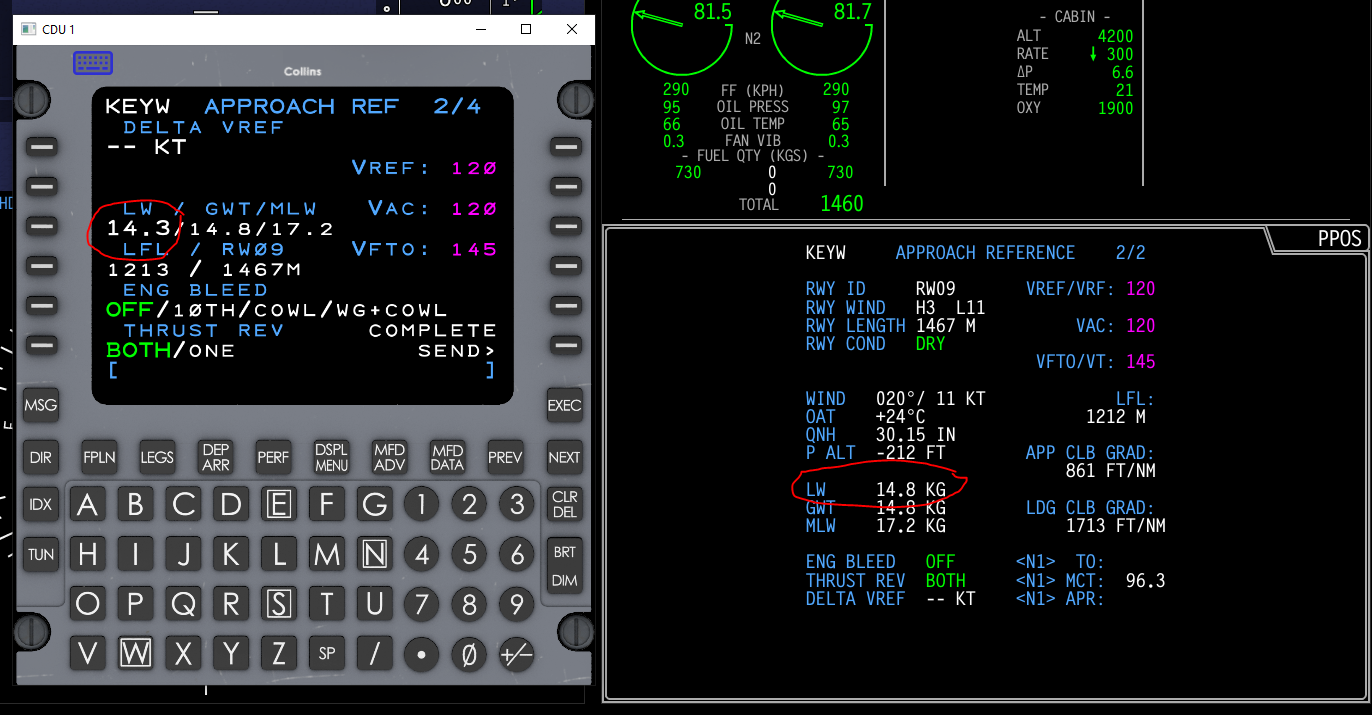
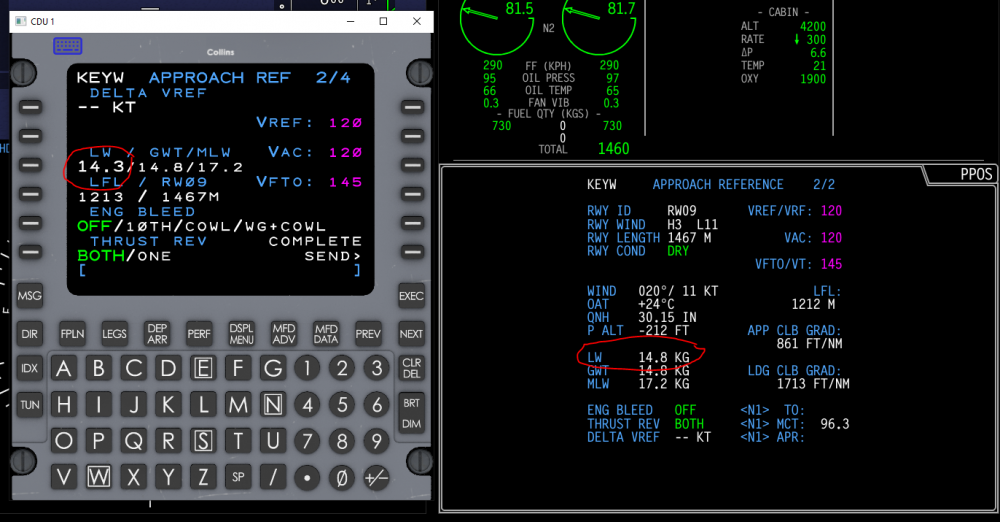
Hi, Having set the LW manually in APPROACH REF on the CDU to 14.3T, it's still showing at 14.8 on the MFD DATA approach reference page:
-
[LOGGED 2335] LRC cruise speed dropping to M0.40
ddunwoody replied to ddunwoody's topic in Technical Support
I've just saved a state file in case that helps later. -
In the cruise, LRC speed just dropped to M0.4 at FL410 with all that implies. Flying with real weather (ActiveSky) on VATSIM with the "Simulate realistic temperature altimeter effects when online" unchecked. Checking that box adjusts the altimeter by about 600ft but doesn't change that VNAV still wants to cruise at M0.40. Video of the CDU here and a state file attached (I have the whole CL650 output dir if required) state.bin



-
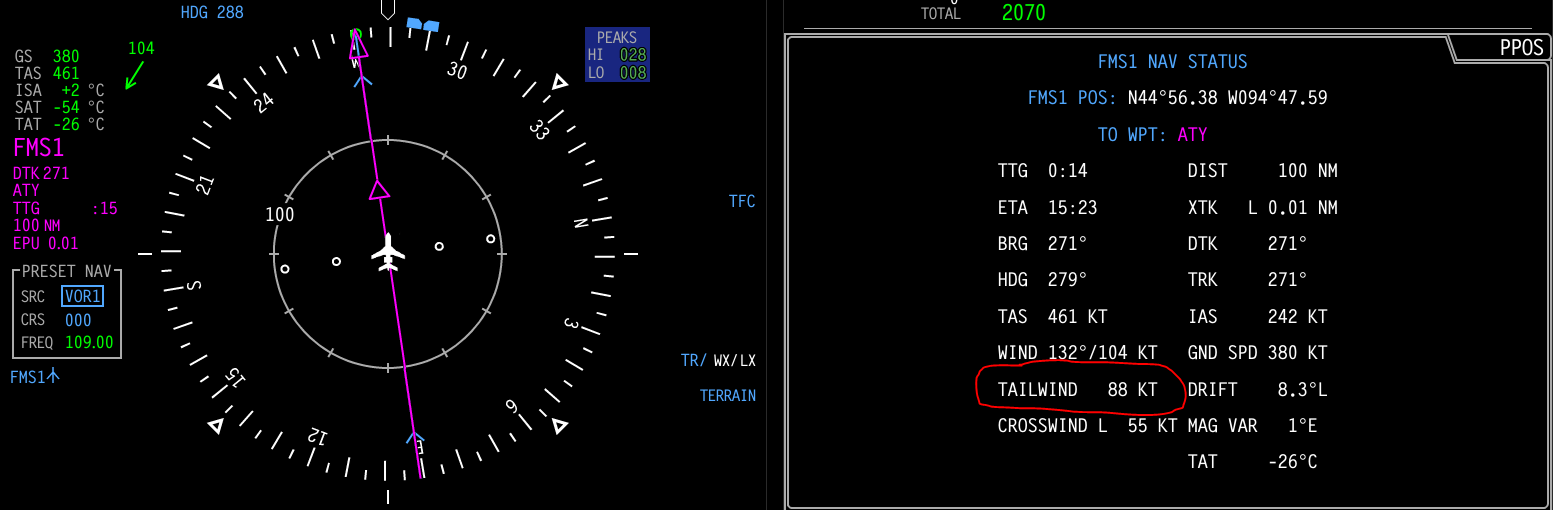
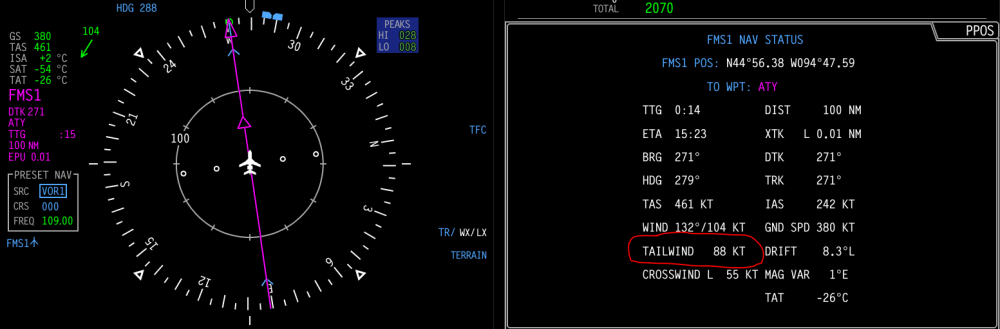
Hi, Cruising at FL400 into a strong headwind, but the nav status page on the MFD (via MFD DATA) is showing a tailwind. I suspect this is a bug:
-
Press MFD DATA, then DSPL MENU and then you can choose a bunch of different pages. If it says something like 1/N in the top right of the MFD page then you can step through pages with MFD ADV. You can use either CDU to control the MFDs but by default CDU1 drives the left MFD, and CDU2 the right.
-
Thanks. As I come across further queries I'll bring them up. It's definitely hitting that spot for me of "I like this enough that I want it to be better"!
-
Hi, I flew last night in 2300m visibility and I was wondering if you could offer any comment on the difference in the two shots below at EBLG taken with the time set 12 hours apart, but otherwise the same conditions (ASXP/RWC/volumentic clouds) (EBLG 240120Z 29010KT 2300 -SN -PL BKN003 M00/M01 Q0994 REFZRA R22L/590294): It feels to me as if the visibility at night should have been worse.

-
Glad to see this thread; thanks for bringing it up and the clear comments from @sundog. I think this explains why my flight into EBLG last night was easier than expected this this METAR: EBLG 240120Z 29010KT 2300 -SN -PL BKN003 M00/M01 Q0994 REFZRA R22L/590294 (I'm using ASXP and RWC) I think it's a great idea not to remove the lowest cloud layer, and my suggestion for working around the difficulty of cloud/terrain intersection would be to sharply restrict visibility while in OVC (and possibly in BKN) down to the lowest cloud base. In the case above limit visibility to (a guess) 100m until EBLG+300ft and then up the visibility rapidly to 2300m. This would give the impression of breaking out/close to at minimums, which is what I had been hoping for above. To finish on a positive note - it's a great product and the clouds do feel more lifelike in motion vs 4. The "problem" I think you have is that v4 is so good at everything that everyone is going to be pushing for improvements to 5 until it gets to the same level! David