flyingfudge
-
Posts
50 -
Joined
-
Last visited
1 Follower

flyingfudge's Achievements
")





-
Same here. Purchased the CL650 on day one & I haven't flown any other aircraft since. It's incredible what Toto, Goran & their supporting team have produced.
-
Many thanks for the detailed explanation @VictoryAJ I haven't been using the HUD in the Challenger because I don't fully understand what it's telling me. When you've got the time, a video showing the practical application of the benefits you've described would be brilliant.
-
Yep, it's very accurate as confirmed by a current corporate CL650 pilot.
-
If you've got an ipad or iphone this works well for W&B https://apps.apple.com/ca/app/pan-aero-weight-and-balance-cl600-cl604-cl605/id904328430
-
That's what it is. Bearing & distance pointer.
-
Absolutely. In RL the PM would setup the approach speeds in the FMS once the aircraft has been cleaned up after the go-around and is being vectored for another approach. With the high workload associated at the go-around the PF would normally engage the autopilot as early as practicable allowing time for both pilots to complete and cross-check cockpit preparations, checklists etc in readiness for the subsequent approach. Single pilot in the sim is quite demanding but shouldn't take long to change the approach in the FMS, check the landing weight and send the revised perf landing v-speeds in the FMS especially if you're entering a hold after the go-around.
-
Glad you got it sorted. Don't worry, it caught me out the first time it happened to me as well!
-
@KirkR Sounds like that's the culprit! If the co-pilot's side is on green screen and not FMS NAV then the NAV-NAV xfer doesn't activate.
-
@KirkROn the approach after the GA you were effectively in "no-mans land" as far as the FMS was concerned. It was in a state of "discontinuity" . Effectively you had two choices from the radar vectored approach in HDG mode, either go direct TOLPE ( with intercept course if req'd) as in your first approach in HDG mode and arm the approach ( this would have given you the req'd NAV to NAV transfer) or select "NAV SRC" to change to green screen before localiser capture. Either would have intercepted and captured the localiser correctly.
-
Yep. The red light has been reported previously. I remember Goran said on the Discord channel he'll fix it for the next update.
-
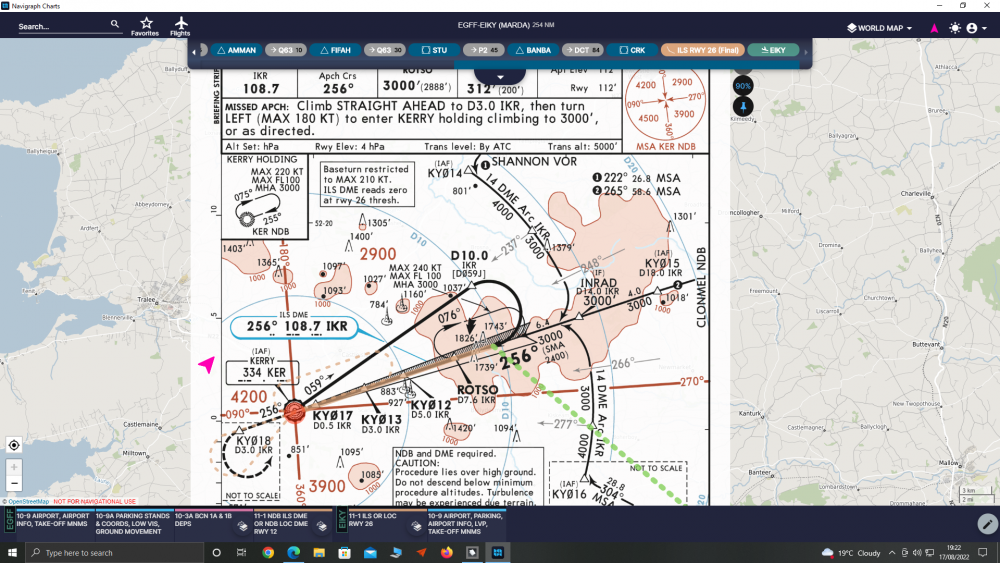
ROUTE ID: DEFRTE EGFF/12 BCN1B BCN Q63 STU P2 BANBA DCT CRK DCT EIKY/26 As per the title, the aircraft turned right instead of left on the go-around. ( same on v1.6.1 and the Beta version ) Log.txt


-
ATS unexpected disconnect on TO roll (see video)
flyingfudge replied to KirkR's topic in Flying the Challenger
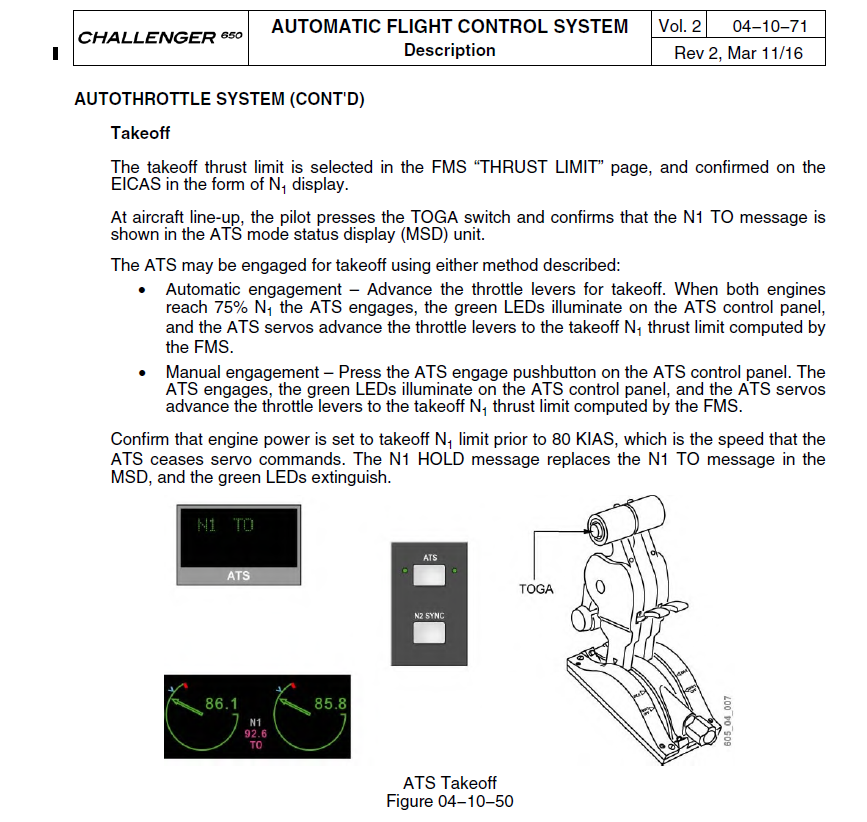
@KirkR Your solution seems to work but I've found the easiest solution, especially if flying online, is instead of advancing the thrust levers to activate the ATS, instead press the ATS button on the glareshield panel. If it flashes and disconnects then press it a second time and it always activates with the second press. This method is an approved manual alternative to the automatic engagement when advancing the thrust levers.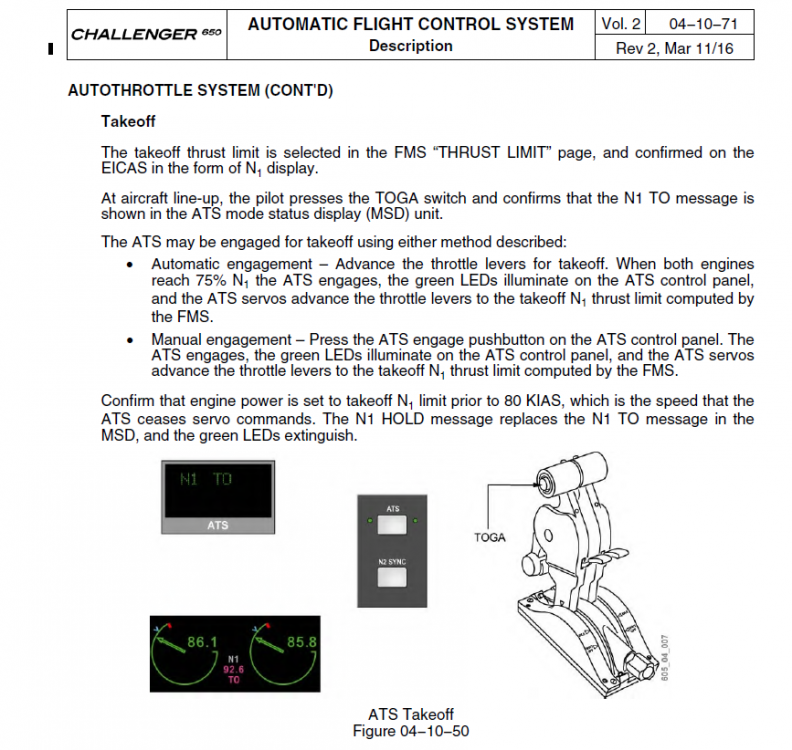
-
Route: LZIB/31 TOVKA1A TOVKA DCT LANUX DCT OKF DCT HDO M725 KOBUS P31 BUKIG DCT NUKRO NUK07R EDDB/07R I had a CDT when airborne selecting the RNP 07R approach in the FMS. I then used the situation auto-save but as soon as I selected the approach the sim crashed again. It even crashes if the RNP 07R approach is inserted on the ground before taxi. I tried it on the v1.7-beta 1 just out of interest and the same happened again. Attached 2 x Log.txt: Aircraft on ground in 1.6.1 & airborne in 1.7 Beta.(Log2) ( If the ILS 07R is selected it doesn't crash - maybe a Navigraph error?? ) Log.txt Log2.txt CL650_Log.txt CL650_Log2.txt
-
ATS unexpected disconnect on TO roll (see video)
flyingfudge replied to KirkR's topic in Flying the Challenger
Unfortunately I'm still getting the same problem. Hopefully it will be fixed in a future update. -
Make sure you've got a valid N1 value indicating on the EICAS. eg: Automated "in range checklist" doesn't always automatically do this for you. You have to insert the appropriate N1 thrust required for the go-around in the FMS "PERF" page. Without a valid N1 the ATS disconnects and will not reconnect until the N1 value is set. I'm pretty sure a similar situation can occur with the after takeoff automated checklist. I believe if it's delayed past 15,000 ft the ATS will lose the N1 target and disengage. ( after t/off checklist calls for transition to CLB thrust )