Litjan
-
Posts
5,718 -
Joined
-
Last visited
-
Days Won
424
Content Type
Profiles
Forums
Latest X-Plane & Community News
Events
Downloads
Store
Everything posted by Litjan
-
Yeah, same here - ok, this is funny because I am also on Nvidia and the M is in the right spot for me. Hmm...
-
You will have to wait for us to fix the wiper switches.
-

IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
You still have this: 0:09:33.774 G64: debug: IXEG: Level-1 PASS / Level-2 FAIL. License invalid You need to wait for X-Aviation to roll out the fix for this, nothing you will do until then will help you. -
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
You ALWAYS want to have the selection on "Start with engines running" in the X-Plane aircraft selection menu. -
Are you using Zink? Does it change if you disable Zink?
-
Awesome... do you mind if I use this as a baseline for the "official" fix? No, the wipers are something else.
-
Yes. you also suffer from the level 2 check failure - this should get resolved soon (X-Aviation is working on it) 0:07:56.725 G64: debug: IXEG: Level-2 check FAILED
-
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
Glad that worked for you! Let me know if XPRealistic plays along (it should). -
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
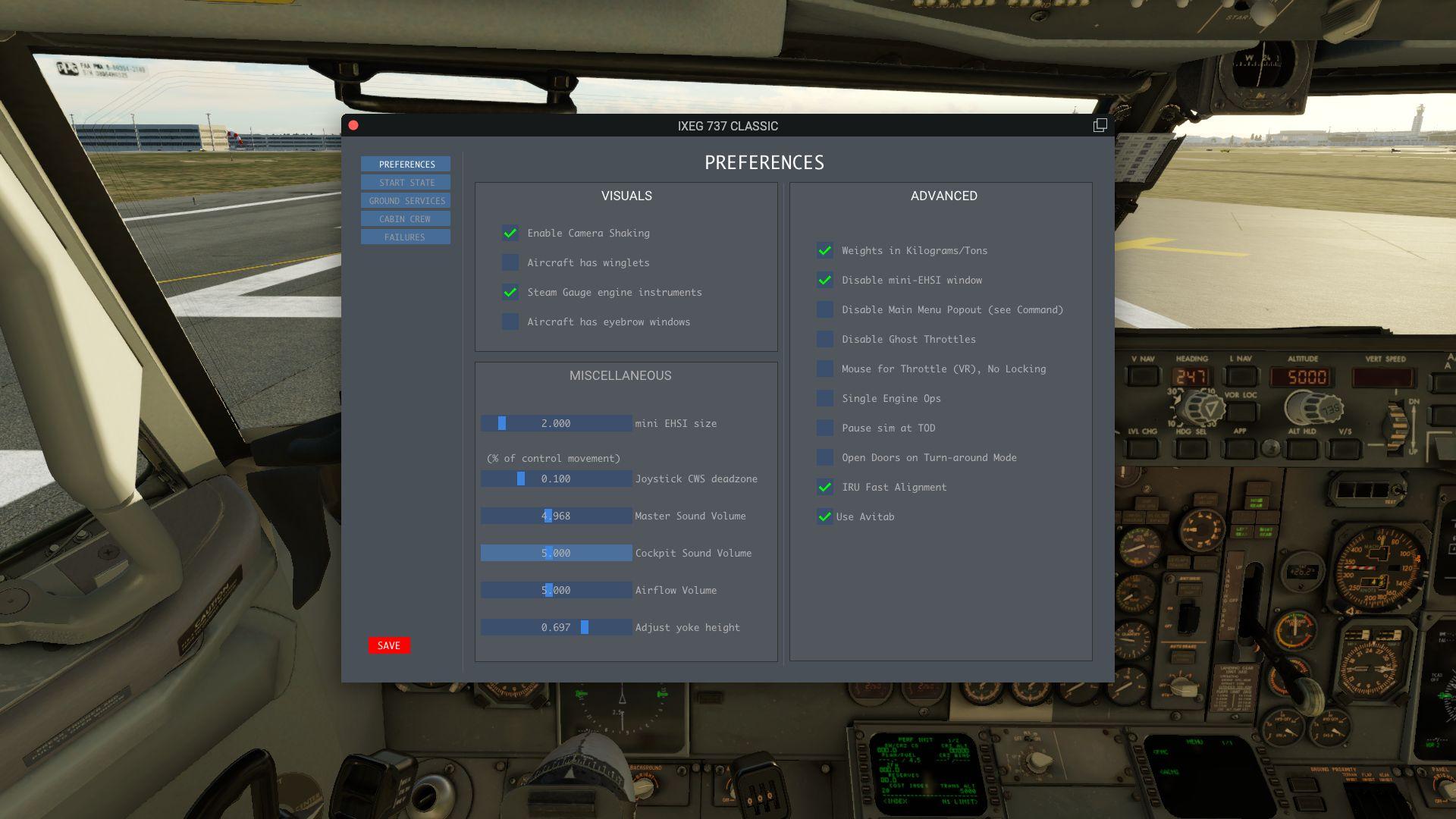
You guys ARE using the IXEG preferences menu to set up the sounds, right?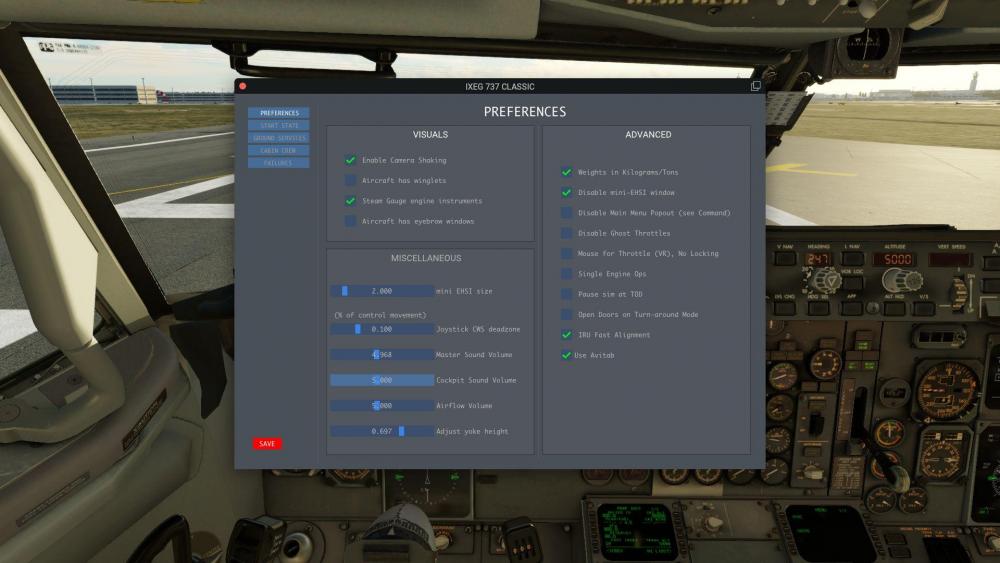
-
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
Yes, this is also known - ever since I became a Captain in 2008 I lost all interest in making the right side more functional . Just kidding, of course - we have plans to improve the FO side functionality in the future, not sure if we can get WXR and Terrain working, but at least get the POS INIT, PLAN mode (and also the PLAN mode while IRS not aligned yet) should be possible! -
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
I am using the standard "50%" settings and that seems to work good for me. -
I remember them being very dim at nights...but I will see if we can bump them up a bit.
-
Interesting... I will forward this to @tkyler he is the one that can see the Matrix read the xml database and will be able to see what the problem is. Thanks for bringing this up! I have already adjusted our starter strength to reach ca. 22%N2 on a hot day at Benito Juarez
-
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
Yes, this is due to new physics in X-Plane 12 - they are representing real world effects, but are probably a bit too strong in the case of our 737. Austin models the downwash of the wings making the air go "down" behind the wings - and if the horizontal stabilizer is in this downwash, it gets more effect (pushes tail down). So if the plane lifts the nose, the tail moves close to the ground into an area where the air can not "flow down" anymore (because the ground is in the way). It looses effectiveness and the pilot has to "pull more" to make the nose keep going up. Once the plane is out of the ground effect climbing, this effect gets re-established and you can "relax" the pull a bit. The real 737 has the same effect: You initiate rotation fairly easily, then the plane "stops" rotating when you reach about 10 degrees and you have to pull MORE to keep the nose going up (recommended is 3 deg per second rotation rate). Once the plane is lifted off and climbs out, you can relax this extra pull. Its almost as if there was a "resistance" to the nose moving up around 10 degrees pitch. It works the same on landing, the closer you get to the ground, the more you have to "pull" to keep your nose from dropping. This is more pronounced now in XP12 and one has to adjust the technique: When passing 50 feet, make sure to keep nose up at the same pitch! When passing 30 feet, pull nose up by 3 degrees and HOLD IT THERE. At 20 feet, pull power back to idle. -
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
Yup, all known. Thanks for the report! -
I am not sure, but I think it does not depend on if you upgraded or bought new. It seems to depend on other things like plugins installed and/or internet connectivity settings.
-
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
I have updated some stickied posts here on the main page, namely the FAQ post (with a link to the "known bugs" post) and the "what will not be in V1.5" post. -
Yes, I know that the N2 is not sufficient at Mexico City - I misunderstood you and thought you also reported too little N2 at sea level. For the VOR interception I flew towards the radial with HDG SEL and VOR/LOC armed. When VOR captured (HDG green turns to VOR green) the plane banked to intercept the set radial. Is this not happening for you? If you look at the approach chart for Merida that you posted you can see that all these different approach transitions have IAF´s that are ALL called "DXX.0 MID". There are some with D17.0, some with D12.0 and some with D10.0 - that is why our FMS thinks that there are three different ILS approaches available, I bet. Separating approach transitions requires them to have unique names, if there are several that all start at "D12.0 MID" then our code can´t distinguish them.
-
Hi everyone! Thanks for everyone´s support and feedback for our initial launch of the IXEG 737 in XP12. This post will detail the bugs that were reported and confirmed by us. This post will be updated regularly and shall serve as a tool to check if something you observe has already been reported. Activation issues with the DRM that revolve around the "Level 2 check" failing - fixed Wiper switches not working - fixed for next patch Standby airspeed indicator drum not moving - fixed for next patch Bullseye windows on doors 3L and 3R too far outboard - fixed for next patch VRconfig.txt file missing - fixed for next patch Starter not strong enough at high density altitudes - fixed for next patch Engine start process going too fast - improved (total duration matches) but fix in LR´s court Wing illumination light not working - fixed for next patch Visual texture glitch on underside of left wing - fixed for next patch Taxi light a bit too dim MCP backlighting a bit too dim Window heat OFF logic reversed for right side windows - fixed for next patch No turnoff light for right side - fixed for next patch INVALID ENTRY message when trying to manually enter a V1 on TAKEOFF REF page - fixed for next patch Pitch up moment change during liftoff and landing too strong - fixed for next patch Idle fuel flow too low - fixed for next patch No CDU backlit keys - fixed for next patch. FMC / Gizmo crash when executing VNAV calc with only one waypoint in LEGS - fixed for next patch. ECAM gauge needles not lit up at night - fixed for next patch. Added four commands to command the fuel lever to idle/cutoff. For hardware binding to buttons/switches. Linked to default XP commands to connect/disconnect/toggle the GPU. Helpful for VR users. Cockpit door default to pen in the Turn-around mode Cockpit door occludes front galley lighting at night when closed. Fuel Crossfeed annunciator dimmer (less bright) when crossfeed valve open. Was too bright. - fixed for next patch.
-
- 11
-

-
This is a new feature to improve airflow in the cabin on flights where they serve beans or peas!
-
X-Aviation is working to fix this problem!
-
Bought xplane 12, and the upgraded version of IXEG 737, no activation window.
Litjan replied to Jipvk's topic in Bug Reports
That is unfortunately correct -
IXEG 737 Classic Plus - Releasing Friday, September 15th!
Litjan replied to Cameron's topic in General Discussion
Some of these are already known and some will/may be implemented in the future. Some of your observations I can not confirm (LSKs, Econ Index, FMC background light (there is none)) -
Yes, there are several folks with a "Level 2 DRM check fail" in the log.txt in the X-Plane main folder. Can you confirm this is also the case here?