


Cyber Copter
-
Posts
10 -
Joined
-
Last visited
Cyber Copter's Achievements
")





-
My BN-2T has been crashing upon loading consistently regardless of avionics version. I wish this could be fixed. Log.txt attached. The BN-2B versions load with no errors. Log.txt
-
Mu-2B Crashes X-Plane 12 when G500 Plugin is installed.
Cyber Copter replied to Cyber Copter's topic in G500 Avionics Suite
I tried the replacement opengpws plugin, but XP still suffered CTD. It's sufficient that I know now to just avoid TE GB for XP12. Thanks for solving that, it would have taken me ages to just try flying somewhere else. This bird is a joy to fly, I like it so much better than the King air family. I really like your turbine Islanders too. Thanks again! -
Mu-2B Crashes X-Plane 12 when G500 Plugin is installed.
Cyber Copter replied to Cyber Copter's topic in G500 Avionics Suite
Thanks for the helpful responses. I've not had a lot of time to act on them but will give some feedback when I do. -
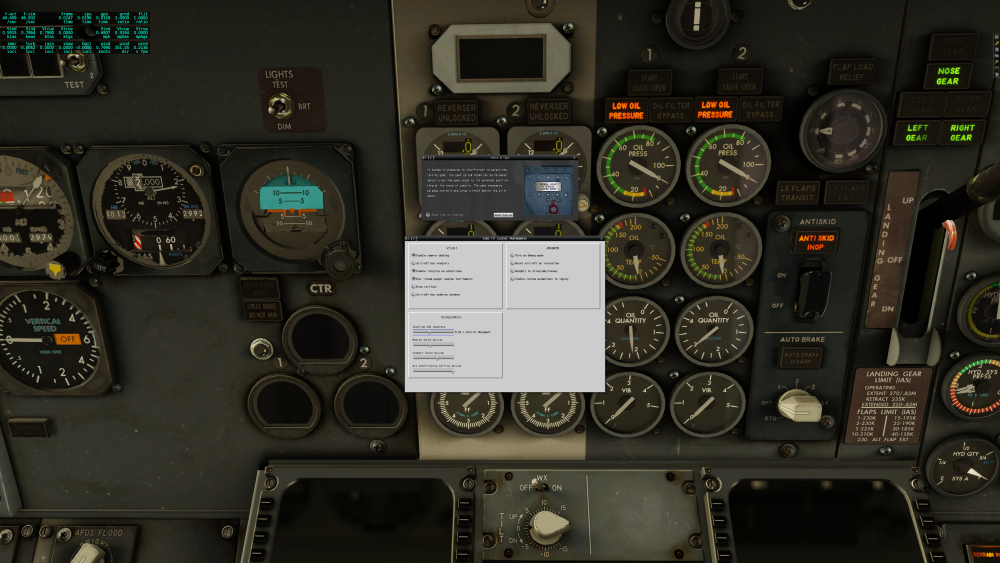
Hello, I have a respectful request for an update. I attached a screenshot which includes my zoomed cockpit view, native x-plane data out onscreen text, and the IXEG plugin window interface. The text in the plugin IXEG interface windows is close to unreadable for my eyes on my 4K monitor. I've noticed responses in previous threads stating that this issue is a subject that few raise concerns about. I would like to politely disagree. I don't think that silence is indicative that the people are satisfied. I have waited years before I went to the effort to start a thread. 4K is currently a widely adopted display format, I think it is reasonable to kindly ask that some resources be devoted to updating this and other effected products. I have licenses for several of your products. This text size issue undoubtedly reduces the frequency that I use them. Thanks for your attention.
-
Mu-2B Crashes X-Plane 12 when G500 Plugin is installed.
Cyber Copter replied to Cyber Copter's topic in G500 Avionics Suite
The G500 crashes X-Plane 12 in the BN-2T also. -
Log.txt X-Plane 12 runs fine with any variant of the Mu-2B (without the G500 plugin). With the G500 plugin installed X-Plane crashes within 10 seconds after drawing the Mu-2B 3D cockpit. Log.txt is attached.
-
TOGA Simulation MU-2 Marquise v2.1.0 Update Released!
Cyber Copter replied to Cameron's topic in Mitsubishi Marquise MU-2 v2
I've been having some issues too. I also cannot see any illuminated indicators for the audio monitoring channels. I can monitor Com radios, but don't hear any morse identifiers on the Nav monitor channels. I haven't verified if I can transmit. The RXP GPS was pretty grumpy to get initialized for the first time but has settled down after I forced the use of the default Laminar GPS, and then tried the RXP again. This is probably is probably not a high priority issue, but I observed that when I use my Plane Command voice triggered copilot software some of the commands associated with the avionics were ineffective. I installed the aircraft from a fresh download today. The MU is a brilliant flier, I like her a lot! -
I just installed the MU-2 in X-Plane 12 on Windows and it's just fantastic to fly! I really like flying old school approaches with DME Arcs, etc. The addition of some DME gear to the panel would be very much appreciated. Thanks for your attention.
-
BN-2T Turbine Islander v2.0 Update Released!
Cyber Copter replied to Cameron's topic in BN-2T Turbine Islander
OK, I worked out a way to get the reverse to work. I mapped a toggle reverse button, used plain throttle response curves, and advance the throttles gently from idle after the beta lights illuminate. That seems to achieve reverse thrust reliably. -
Cyber Copter joined the community
-
BN-2T Turbine Islander v2.0 Update Released!
Cyber Copter replied to Cameron's topic in BN-2T Turbine Islander
Thanks for the update. The one thing I cannot get to function is the reverse thrust. I've tried all the native X-Plane quadrant tools: "toggle thrust reverse" button push; "hold thrust reverse at max" button push; and the default "beta and reverse detents" response curve. I searched the included docs but didn't find a recommended set up for the throttle controller. At present the thrust reverse control/response has been iffy at best, not what a pilot would ever rely upon. Given my choice I would like the model to respond to the default beta/response curve without any other configuration. Otherwise I love the model, I just wish I could use the reverse thrust. I'm using fully updated X-Plane 12 and a Honey Comb Bravo quadrant on a Windows 11 Alienware R12.
