daemotron
-
Posts
324 -
Joined
-
Last visited
-
Days Won
13
Content Type
Profiles
Forums
Latest X-Plane & Community News
Events
Downloads
Store
Everything posted by daemotron
-
I'm usually not that guy, but in this case, don't get your hopes too high. The last progress update (no, not aircraft update, just an update on the update) was in July last year, and since then, the developer keeps radio silence. It's been almost two years since the Moo last got an update (May 2023); bugs long known (missing click spot etc.) never got fixed (or the fix never published). That's sad for a $60 add-on, but nothing we can do about.
-
I'm observing a few smaller issues with persistence: While all covers, tie-downs and chocks are usually (re)stored as I left them, the engine plugs are systematically omitted Payload and fuel is a hit and miss, sometimes it's restored, sometimes it isn't (seems like it's stuck with a very old state which it reloads over and over again) Same goes for the headset; I always remove it after a flight, but there's a good chance it's back when reloading the aircraft Would be great if these could be fixed; e.g. by providing a menu "store this state", forcing to write the current state (if XPs shutdown process isn't reliably triggering the save state function or not leaving enough time for it to finish what it's supposed to do).
-
When switching of the strobes, they go from flashing to constantly lit instead of constantly dark:

-
As the title says, the NEAREST AIRPORTS list on the G1000 also shows helipads (zero runway length). Iirc the G1000 could be set up to filter airports with insufficient runway length. The shortest possible TO ground roll according to the POH (ISA -15, SL, 1100kg TOW) is 280m (919ft). The shorted possible landing distance (ground roll) under the same conditions is indicated with 255m (837ft). Maybe (and only if XP really supports this) it would make sense to filter out airfields with less than 250m of runway, or with a "margin of despair" anything with less than 200m.

-
Just a minor visual thing, when turning the BARO selector knob (outer knob), the turn animation for the inner knob is triggered, and vice versa. It's just a visual thing, using the outer interaction zone correctly changes the baro setting, and the inner the course.
-
The Windows installer doesn't launch from within the zip file. Just unpack the zip file somewhere on your disk (with its folder structure!), and the installer should work.
-
The main tank indicator (and fuel test) only works when the main inverter is switched on. The outer and tip indicators work as soon as there's battery power.
-
It's been a while... my Moo-venture continued; after a trip around Australia (including a short hop over to New Zealand), I finally reached Point Barrow, Alaska on October 31. Here's the complete route with all stops: The GC distance of the route legs add up to 22,215 NM, and the flight log shows a total block time of 101:38 h. Utqiagvik is a bit too cold for my liking in winter, so I saddled the Moo once more and started moving south, this time headed for Santa Fe, NM. So far I flew back to Fairbanks, and then on to Yakutat and Prince George. The FBO at Yakutat wins the price for the best slogan:



-

Crash in G500 plugin when shutting down
daemotron replied to daemotron's topic in G500 Avionics Suite
Hi Tom, not on a Mac, this is on a Windows 11 machine. -
This one seems to be tricky to nail down. It doesn't happen regularly, but just once out of 10 X-Plane shutdowns with the MU-2 (which embeds the G500). I'm not even sure the crash condition comes from the g500 code itself, but the stack trace points to it, so maybe there's something which under certain circumstances can produce a CTD: 2023-11-24 20:40:41 OpenGPWS[xplane.c:344]: OpenGPWS disabling --=={This application has crashed!}==-- --=={FILE: D:\X-Plane 12\Log_ATC.txt}==-- 2023-11-24 20:40:41 OpenGPWS[xplane.c:348]: OpenGPWS disable complete 2023-11-24 20:40:41 G500[Main.cpp:131]: XPluginDisable 2023-11-24 20:40:41 G500[g500.cpp:109]: Disable G500 2023-11-24 20:40:41 G500[g500.cpp:111]: Disable Popup System 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G500 MFD Bezelless 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G500 PFD Bezelless 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G500 Combined Bezel-less 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G500 Combined 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini GDU620 (Heli) Combined 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini GDU620 (Heli) Combined Bezel-less 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G500 Combined Bezel-less (G500 Hardware) 2023-11-24 20:40:41 G500[popupSystem.cpp:800]: Fini G620 (Heli) Combined Bezel-less (G500 Hardware) 2023-11-24 20:40:41 G500[g500.cpp:113]: Disable PFD 2023-11-24 20:40:41 G500[g500.cpp:115]: Disable MFD --=={UUID: 61a9851d-30aa-4e8e-91cf-808c4d1665fb}==-- (full log and crash report attached) telemetry_0.zip 61a9851d-30aa-4e8e-91cf-808c4d1665fb.zip Log.txt
-
[2.0.3] CtD on X-Plane 12.07r1 with assertion "dr->writable" failed
daemotron replied to daemotron's topic in Douglas DC-3 v2
Ah, that would explain it - I installed the update and tried to load the DC-3 first. After the crash, I loaded XP with a different aircraft, entered the X-A credentials, and now I can load the DC-3. -
As the title says, I get a bizarre CTD with 2.0.3 - when loading the aircraft, X-Plane crashes, and I find this in the log: 2023-11-15 17:05:50 [LES DC3 Systems]: [dr.c:135]: assertion "dr->writable" failed: dataref "sim/flightmodel/weight/m_fuel_total" is not writable (dc3.c:153: &fuel_qty_total) --=={This application has crashed because of the plugin: LES DC3v2}==-- AFAIR this data never was writable in any X-Plane version before; the writable one is sim/flightmodel/weight/m_fuel (array with 9 floats, one for each tank). Log.txt
-
Well, this is what you sign up to when installing a beta. Laminar has always been transparent about this. You can't demand payware developers provide immediate updates for every beta Laminar tosses out. 12.0.8b1 has introduced a number of issues with a number of addon aircraft - some of them will likely need fixing on aircraft dev side, some will require Laminar to fix their beta code. Let's wait until 12.0.8 turns final, and then HS will be able to tell if they really have to update the Challenger, and if yes, what exactly they have to update. Anything else is just a waste of precious dev time by chasing a quick moving target.
-
@Coop maybe it's an option to remove the FSE override in future versions, to avoid any confusion. The latest iteration of the FSEconomy client allows to exempt a specific aircraft model from loading fuel and/or payload, which is particularly useful for aircraft coming with their own W&B management. The only thing that needs to remain in place is that the following data refs read appropriate values: sim/aircraft/overflow/acf_tank_rat sim/aircraft/weight/acf_m_fuel_tot sim/flightmodel/weight/m_fuel sim/flightmodel/weight/m_fuel_total The FSEconomy client will need these to determine the fuel spill and fuel burn, but when automatic loading is switched off, it won't attempt to write them. If you need more details, just holler me (I'm the author and maintainer of the current FSE client).
-
 Thank you for this beautiful livery!
Thank you for this beautiful livery!-
- 2
-

-
There are two commands defined for the DC-3: les/dc3/cmd/controls/L_mixture_up les/dc3/cmd/controls/R_mixture_up I bound both to hardware keys. R_mixture_up works and moves the right mixture lever up to the next position. The L_mixture_up command doesn't do anything. Ticking the checkbox in the settings dialog doesn't seem to have any influence.
-
FSB / NS Chime only plays once
daemotron replied to daemotron's topic in Mitsubishi Marquise MU-2 v2
Sure, only talking about the chime when switching it on. Hm, that one's hard to nail down - on some flights, no chime at all, on some flights, it works all the time, and on some, it works at the beginning, then stops. I can't really tell yet what I have to do to break it, seems completely random. -
That's a really minor one - I noticed that when switching on the FSB and NS signs for the first time, a chime sound plays - but not when switching them on later down the flight.
-
I was flying a short descent in cruise, using VS mode and ALT SEL armed, altitude pre-selected on the G500. When reaching the selected altitude, the VS and ALT SEL lights on the AP panel went off, and altitude was (at least seemingly*) captured, but the green ON light on the ALT button didn't light up. De-pressing and re-pressing the ALT button itself made the green ON light come up. This seems to concern only the glass version, never had this in the GNS version. *tbh I didn't wait long enough to determine whether it had really captured or not; my VS for the descent was pretty low (-200fpm).
-
No way to adjust payload on xp12?
daemotron replied to Milhouse's topic in Mitsubishi Marquise MU-2 v2
I suppose it hasn't XP12 style load stations yet. If you want to brute-force adjust your ZFW, you could use Data Ref Editor and write something into sim/flightmodel/weight/m_fixed (the numeric value represents payload in kgs). -
Dug out the G500 version for the first time in XP12. I noticed the clickspot for the MFD knob is (still) missing in the XP12 version - cf. so putting this here as reminder for whenever is the Moo's next turn for a patch
-
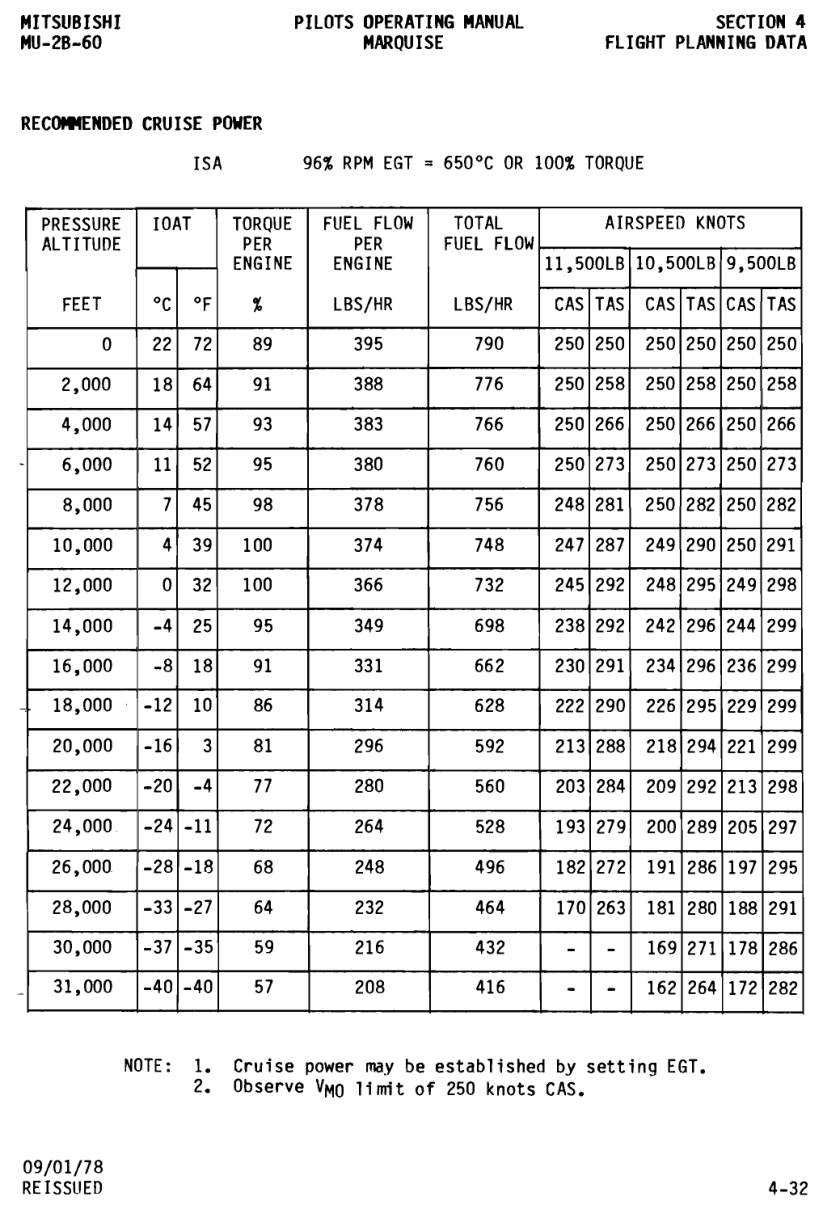
Cruise power isn't too far off (though it depends a bit on altitude, and not all parameters will hit the POM values): Getting those all dialed in will possibly not work - there are also tables for ISA +/- 10, 20 and 30, and then the same for max range power (the one above is for recommended cruise, i.e. pretty much the maximum you can get from those TPEs). In total there are nearly 1,300 different altitudes, temperatures and power settings to be dialed in (108 table lines * 3 weights * 2 different power settings * 2 different props (4 & 5 blade)), and for each you'd have to align four data points (torque, ITT, fuel flow, airspeed), so a total of over 5,000 data points. With the way X-Plane's engine, prop, lift and drag models work, I don't see this is close to possible - you can nail one setting by tweaking the fuselage shape, airfoils, engine and prop parameters and curves, but that will most likely throw you off course for another data point. So Tom's dilemma here will be that he has to chose which data points to align to, and accept that others will be somewhat off. If I understood Isaac correctly though, he was more addressing the engine limits in climb (first they're torque limited, later on they're temperature limited) - that'd be the next >5,000 data points to pin down... Finally, I'd like to say these discussions here sometimes come across as if we only had to criticize the Moo - we're so much quicker in reporting issues and bugs than being grateful for how great a Moo model Tom created here. Tom, if you read this, the MU v2 is great and deserves more visibility in public (and more sales). It is by a huge margin the aircraft model I fly and enjoy the most ever since it released for XP12.

-
[v1.5] Mixture Up / Down doesn't work anymore
daemotron replied to daemotron's topic in Hardware/Cockpit Dev
Thank you Tom, these commands are just perfect! I understand that initially you didn't want those single event commands - for keyboard & mouse they're not too suitable and oversimplify. I'd see them only useful for people trying to bind stuff to hardware. Yeah, I didn't attribute this to code on your end, I thought that XP's behaviour changed - but my memory may be leaking, I hope I'm not confusing things... -
[v1.5] Mixture Up / Down doesn't work anymore
daemotron replied to daemotron's topic in Hardware/Cockpit Dev
It works with buttons and also keyboard assignments (sending the command repeatedly), but before it also worked with switches (sending the command only once). Tbh I only noticed it since I had those assigned to the engine fuel flow switches on my Warthog throttle (simple two way switches). -
In older versions, the command to move the engine fuel levers used to be mixture up / down. With XP12 and the IXEG v1.5, these commands still make the fuel levers move a tiny bit, but not slide up/down entirely between the IDLE and CUTOFF position.