thiengo
-
Posts
75 -
Joined
-
Last visited
Content Type
Profiles
Forums
Latest X-Plane & Community News
Events
Downloads
Store
Everything posted by thiengo
-

BUG - Apu continues to operate even after you have finished fuel
thiengo replied to thiengo's topic in Canadair CRJ-200
Very nice, can this plugin be operated by a remote computer. i am a home builder cockpit and the only interface that i use with x-plane is the hardware that i develop and instructor pc. I did like the video, nice scenery, in Brazil dont have scenery lovely constructed pra xplane, i fly default xplane scenery.. -
BUG - Apu continues to operate even after you have finished fuel
thiengo replied to thiengo's topic in Canadair CRJ-200
No problem, my english is bad too. i guess the Jrollon will see the problem when possible. Was what i understood. Realy the plane is burning fuel until zero. at least, the engines are starting up and running only with fuel in tanks... but APU is starting and running without fuel. Another point interesting to consider is, the tank right and left with 450lbs of fuel in each continuing burning (And must to do) but the burn in this critical level must operate with restriction in pitch angle, dont exceed 10° of pitch in climb... risk to shutoff the engines. Is this correct Elber? (If you are reading this post ) in the future, the project could consider this variable to operate, simulating the unusable fuel remaing, and the critical tank level in high pitch angle. and the fuel port switch action could show the messagens for APU IN BITE diagnostic... and, APU SOV CLSD, APU START, APU LCV OPEN... Is FSEconomy a addon to simulate a company, like the other in Microsoft Flight Simulator 2004/X? -
BUG - Apu continues to operate even after you have finished fuel
thiengo replied to thiengo's topic in Canadair CRJ-200
How dont APU use fuel? Do you mean that apu dont use fuel in CRJ200 Jrollon projetc? apu is a engine like other one. the APU is a fully automated gas turbine power plant The maximum operating altitude of the APU is 37,000 feet. The maximum altitude for APU starting is 30,000 feet. The maximum altitude for main engine starting using APU bleed air is 13,000 feet. ECS operation using APU bleed air is 15,000 feet. Fuel is supplied to the APU fuel control unit from the left and right wing tanks by the XFLOW/APU pump (refer to Chapter 13). The fuel shutoff valve is opened by the ECU at 10% speed. The fuel control unit starts, stops and modulates the flow of fuel to the APU in response to commands from the ECU. This information was taken from Flight Operatio Manual, Chapter Systems - Auxiliary Power Unit. -
TOBS, take a look... Elbert, Thanks for your helping and all improvement to my skills. I expect be helped the TOBS with his doubt Hugs.

-
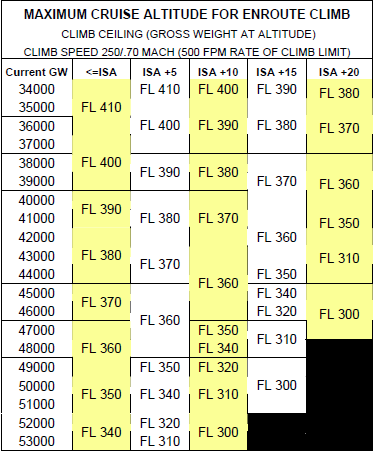
? Exactly, other pilots said this in forums. A bad dog... to climb. X-elbert, confirm to me, Above FL200 is to climb with 290 IAS at 500fpm? Recomended. Is This the performance maintaing 85%N1? approximately
-
No... no... this plugin is a catcher of values from xplane variables that you define... and only by network you will connect with it... It works with the IOCP protocol and is compatible with SIOC and IOCARDS from opencockpits. The secret is the IOCP protocol and the way like the softwares that use this protocol, like FSUIPC and XPUIPC. The connection is granted by 8090 or 8092 port of TCP. The number of connection can be set in a conf file. You must read the document in the zip file and learning more about the settings. Settings form file are simple and fast to set. basicaly is the number of connection, that means the number of client that will connect to the server. Latency of response, means number of catching of values the will be done in a same loop, and debug ... enjoy and have fun. rsrsrsr
-
Nice. Nice. Nice.... This is the best turbo prop aircraft... there isnt a aircraft like it, in it category. I want to say only one more thing. except for the quality of avionics, between us, that i did a fix for my use, this is the best plane for xplane. Perfect performance. Best Regards and congratulations. wonder paint
-
see above your post, I added the file from version 0.4 in the post... download it...
-
I have some documents but no performance charts, only systems and flight patterns. In the Jrollon's material has a performance charts for cruise climb rate, corrected for temperature errors in altimeter. Should consider that at the time of your picture the atmosphere was very hot, others talked about the formation of ice in your pitot tube and static ports, all very relevant. I am lokking for documents, but in Brazil, i dont meet nobody that fly this aircraft. i keep lokking...
-
I am Happy with the CRJ I don't talk. Just fly.
thiengo replied to Japo32's topic in General Discussion
... -
Man, http://forums.jetcareers.com/technical-talk/107924-crj-200-climb-speed-envelope-slow-cruise.html take a look in your TAT for FL... (2°C each 1000fts at 36000, should lose 72°C, the FL temperature should be -57), in your MFD you can see -40°C, 17 degrees abouve ISA Temp... very hot.... so... it is necessary maintain an appropriate FL. In the product manual, there is a performance chart to climb.... with the necessary corrections to the atmosphere isa and taking in consideration your gross weight. hugs...
-
Try UIPCX http://x-planefreeaddons.blogspot.com/2009/10/uipcx-v02.html (version 0.3) It is my uipc plugin, in they you can set a file to determine what is captured and in what will be the offset to them. uipcxv04win.zip
-
I turned the APU on and consume all the fuel from the aircraft, it remained in operation. The same occurs when to start them with fuel tank dry. I would also emphasize the amount of fuel not consumed, it is understood that the operation of engines and the APU should be stopped when the fuel pump is not able to put fuel. operation does not end with zero fuel but with the remaining unused. is a great pleasure to meeting you again, i am flying the big boy to do then better. Data to share Collector Tanks Two collector tanks are located in the forward section of the center wing tank. Fuel from each wing tank is fed under pressure to its respective collector tank by scavenge ejectors. The collector tank capacity is 10 gallons (38 liters) and when the tank is full, excess fuel is vented back to the respective wing tank. Fuel can also be fed from the wing tanks to the associated collector tank by gravity. There is no migration of fuel from the center tank into the collector tanks. A main fuel ejector in each collector tank is immersed in fuel and is used to ensure a positive supply of fuel to the engines. The boost pumps normally supply fuel to the engines for start. During climb, fuel could enter the center tank from the vent system. This fuel can cause erroneous center tank quantity indications as high as 300 lbs (135kg). Fuel tank capacities for pressure fueling operation: TANK USABLE FUEL UNUSABLE FUEL TOTAL FUEL Left Wing 4760 lb (2159 kg) 20.4 lb (9.2 kg) 4780.4 lb (2168.2 kg) Right Wing 4760 lb (2159 kg) 20.4 lb (9.2 kg) 4780.4 lb (2168.2 kg) Center 4998 lb (2267 kg) 6.8 lb (3 kg) 5004.8 lb (2270 kg) Total 14518 lb (6585.2 kg) 47.6 lb (21.6 kg) 14565 lb (6606.8 kg) Fuel tank capacities for gravity fueling operation: TANK USABLE FUEL UNUSABLE FUEL TOTAL FUEL Left Wing 4488 lb (2036 kg) 20.4 lb (9.2 kg) 4508.4 lb (2145.2 kg) Right Wing 4488 lb (2036 kg) 20.4 lb (9.2 kg) 4508.4 lb (2145.2 kg) Center 4930 lb (2236 kg) 6.8 lb (3 kg) 4936.8 lb (2239 kg) Total 13906 lb (6308 kg) 47.6 lb (21.6 kg) 13953.6 lb (6329 kg)
-
I am Happy with the CRJ I don't talk. Just fly.
thiengo replied to Japo32's topic in General Discussion
Cameron, I was wrong to write VNAV without giving details of what I meant. In the manual of FMS Collins 4200, on page 67, ACT PERF INIT PAGE 1. as in many aircraft, reported the cruise FL, determining how they will behave the date the page lines of progress or legs. to trigger the menu VNAV in MCDU, see the "PERF MENU" page, which represent the corresponding stage of flight, climb, descent or Cruizer. so I'm not saying he would maintain a speed, or make changes to a vertical navigation seguindoi levels set, but would report to the pilot selected altitude phases of flight speeds and targets, would be a guide to navigation, including determining the altitudes to pass in positions where a rise or fall. I'm no pilot CRJ200, so even the greatest desire to know how it works. What is telling is that the CRJ200 operates with differences in the software of FMS? TOGA question... Page 109 from FCOM of crj200, automatic flight control system, flight control and guindance... "Lateral Take-Off Mode Lateral take-off mode generates a wings level command while on the ground. After take-off, it generates a heading hold command, with a 5-degree bank limit, using the heading which existed at take-off. Selecting a lateral take-off mode turns on both flight directors, disengages the autopilot and clears all other lateral modes. Lateral take-off mode is selected by pushing one of the thrust lever-mounted TOGA switches while on the ground. Lateral take-off mode is cleared by the selection of FD SYNC or another lateral mode. Lateral take-off mode is annunciated with a green TO message in the lateral capture field on the primary flight display." How do not your CRJ200 have this? page 112 "Lateral Go-Around Mode Lateral go-around mode generates a heading hold command, with a 5 degree bank limit. Selection of lateral go-aroundmode turns on both flight directors, disengages the autopilot, and clears all other lateral modes. Lateral and vertical go-around mode selections are coincident. When lateral go-around causes an autopilot disengage, the resultant autopilot disengage warning may be cancelled by another push of a TOGA switch, or by pushing the AP disconnect switch. Lateral go-around mode is selected by pushing one of the thrust lever-mounted TOGA switches while airborne. Lateral go-around mode is cleared by selection of FD SYNC or another lateral mode. Lateral go-around is annunciated with a green GA message in the lateral capture field on the primary flight display." page 113 "Vertical Take-Off Mode Vertical take-off mode generates a 15 degree pitch-up command. Loss of an engine changes the pitch-up command to 10 degrees. Selecting vertical mode turns on both flight directors, disengages the autopilot, clears all other vertical modes and switches the flight guidance commands to a dual independent configuration. Lateral and vertical take-off mode selections are coincident. When take-off causes an autopilot disengagement, the resultant warning may be cancelled by another push of a TOGA switch, or by pushing the AP disconnect switch. Vertical take-off mode is selected by pushing one of the thrust lever-mounted TOGA switches while on the ground. Vertical take-off mode is cleared by engaging the autopilot, by selecting , or by the selection or capture of another active mode. Vertical take-off mode is annunciated with a green TO message in the vertical capture field on the primary flight display." page 118 "Vertical Go-Around Mode Go-around mode generates a 10-degree pitch-up command. Selection of vertical go-aroundmode turns on both flight directors, disengages autopilot, clears all other vertical modes and switches the flight guidance commands to a dual-independent configuration. Vertical and lateral modes are coincident. When a go-around causes the autopilot to disengage, the autopilot warning can be cancelled by another push to the TOGA switch, or by pushing the AP disconnect switch. Vertical go-around mode is selected by pushing either one of the thrust lever-mounted TOGA switches while airborne. Go-around mode is cleared by engaging the autopilot, by selecting FD SYNC or by the selection or capture of another active mode. Go-around mode is annunciated with a green GA message in the vertical capture field on the primary flight display." page 123 "The autopilot can be disengaged manually by any of the following:..." ... Pressing either TOGA switch on the thrust levers" autothrottle is not directly connected to the toga, toga is important to tell the director what to expect from flight operation at the moment, take off or go-around phases are hoping to control the lateral flight director certain attitudes. some examples of what he was talking about. while I wrote my response Rollon wrote about it with great consideration, however, I encourage you not to quit, you're a great professional and his team is very good, let's make this a great addon and I was wondering .... more to help and do for free, just for the satisfaction of seeing this addon best of the x-plane and as I always say, not only a plane to play, but a plane to study. -
I am a commercial pilot and today operate the EMBRAER Corisco turbo, a single-engine light for four occupants, used in general aviation. I consider myself a serious consumer, so, I want a fully programmed aircraft with 100% of systems in operation in my simulator. I understand that consumers of X-plane, they looking for total realism in yours flight simulator, even if you do not operate with hardkey simulator certified by the FAA, you are expecting for a plataform of study, as such, does not want to be "submerged by half, " the word submerged suggested total immersion. My campaign is full FMS, DP, MD, EICAS fully functional, fully programmed systems and suggest even greater detail for ground operation and the dissemination of the product with original manuals of the aircraft, in return for products like development in highly graphic and with no operational realism. At the risk of being anti ethical, I want to show the example of the Shade Tree, which developed the PC12 incorporating almost 90% of the resources of the cabin, ceding its operations manual in original chapters of CP12, think it was to look real, no, it was because the plane is so well developed that the instruction in the simulator can be based on actual aircraft instruction in all aspects, dispensing with the preparation a short manual, the plane is not summed up, you know, it's almost a groundschool. And I see that the CRJ200 walks the same road, and has absolute tendency to become an aircraft 95% functional, except for silly things such as oxygen masks and such .... However, I would recommend the team attend the variables of actions such as audio panel, while not simulating the logical system of warning signals or communication between compartments, cockpit, headset, cabin, emergency, that these same efetuace programming variables in a boolean level so that we, manufacturers of home cockpits, we can enjoy these datarefs to develop hardware that they offer real-world aircraft systems for the simulation of emergency, as the most audacious goal that a developer can have is to promote a platform studies. to finish, the team may consider my comment tedious and repetitive, and that the purpose of the product is fun, however, say they are more than outweigh the intension is expected of you, you are competent enough for that. Be open to hear even more than hold on, many of us may not have time to read the entire forum and end up in the anxiety to explain his point of view, repeating what has been said many times before. Still, I for example, often speak the same thing on a forum, because I believe you have much work to be done and sometimes can not capture all the soul of a comment, or that moment it was not appropriate to do so, and thus, "the manufacture lucky " to always bet that now, yes, it's a good time to say. we want to see the CRJ200 surpass all other products for x-plane. Best regards
-
I am Happy with the CRJ I don't talk. Just fly.
thiengo replied to Japo32's topic in General Discussion
"Japo32" I think you are performing a great job, I share the view of many people. At first look did not have all the feature set available, so the ongoing work and focus on excellence will bring us many benefits. I have noticed the lack of important resources such as TOGA, lateral mode, VNAV, the FMS is still crawling. PD, MD and EICAS not reproduce some information, however, all these considerations are made by those who bought, showed some faults, flies the plane with great pleasure, thanks your efforts ever can, and try realize what's missing and come here with humbleness to report. Let us not be fools to cry aloud the problems encountered, as we say here in Brazil: talk is easy, doing is another story. I would take a lifetime to try and get more experience doing what they do and not sure if I could. Congratulations on everything and still open to hear who is with you, and we will make it a study platform for people like me, pilots in real life operating other aircraft and would like to be inside cockpits unavailable in real life. Let work to replicate all the systems and resources into this cockpit, not just enough to make it fly. The board of a proud and eager consumer. Make a difference and at the same time compare yourself to the great manufacturers. You have all the tools to take hours of our lives flying his plane. LOL -
Take Command! CRJ-200 Version 1.1 Update Released!
thiengo replied to Cameron's topic in Canadair CRJ-200
solved by the lazy user. I reinstalled version 1.0 and ran the installer in 1.1 over 1.0. When they ask to remove it i said yes and then proceeded normally. -
Take Command! CRJ-200 Version 1.1 Update Released!
thiengo replied to Cameron's topic in Canadair CRJ-200
I started the installation before removing, i stopped it and i started in the removal procedure of version 1.0, however, the installation of 1.1 is giving error. says can not find the uninstall of CRJ200.
-
Gentlemen, I loved the project, how many loved too. So, I sent many messages to Rollon even before you finish reading the documentation. I broke my face to discover that many of the points that I found missing are being prepared for a new version, which gives it the anxiety. i thanks for all this connect with the guys and the chance to say what I think. Once again thanking the ability to hear the team's CRJ200, i come to suggest Rollon and Philipi, beyond the 100% promised buttons and displays datarefs, a version of the aircraft for loading acf without despendiosos panel and graphics that are only useful to flying without a home cockpit. I would be very happy to see this idea take form. hugs and much success to all. -thiengo
-
PC12 in the shade tree project, my favorite, until you leave the CRJ200 and 100% functional with all available datarefs,. They have two versions of acf, a Normal Condition for the Power Level and another that detects the positioner lever and keep the 12% I think, of the joystick to reverse. not apply to this project, since the reverse lever is different, however, we could have a dataref with the amplitude of an analog axis, where reading a potentiometer (analog input) eviaríamos this value to the shaft and a reverse button idle detent position, so we could confirm throttle at idle through notch. for home use without a cockpit, the possibility exists for the reverse link to a joystick axis?
-
[SOLVED] Custom Keystrokes / Joystickbuttons
thiengo replied to TOBS's topic in Version 1.0 Support - Closed!
Philip In one of the posts said you can not provide support to the hardware market, but for the vast majority of home cockpit builders, just offer all datarefs and a way to load them or write them. Example: Opencockpits working with protocols and uicpx IOCP is a plugin that loads and writes datarefs X-plane, so release the datarefs we will play. The example the start button dataref of the reactor, the position he has pressed and released as an LED that indicates on and off, I assume that would be two datarefs important, the position of the button and the light situation, so when I press my button I can through the medium of software IOCARDS (Opencockpits) send a signal to the xPlane UIPCX plugin and change the value of dataref button start the reactor, and so the light comes on, I can read this and across the dataref IOCARD send an electrical signal to a card that outputs the corresponding LED will light up the value of this dataref be changed ... Opencokpits I use and only takes datarefs all of its product, as well as, provide a way to regroup the windows PFD MFD EICAS MCDU in computer monitors without us even do it manually, so we loaded our CRJ200 at our home and cockpit the screens will automatically be charged according to the monitors added in our CPU. A tip ... Great job, I bought today and I have seen some major bugs, mainly in the logic of the autopilot, he is not maintaining altitude and are uncoordinated random ups and downs in trying to restore the original flight level if he loses and does not respond to VS. Another thing I noticed that there are many routines cabin unscheduled, mainly in the PFD MFD EICAS and Screens ... backups, trading screens, status messages, and the overhead panel. even with these missing items, the product is very good, I hope you have many developments in mind and that the team's work will produce a cockpit and flight deck routines 100% functional. Best regards. -thiengo (Brazil)